Github Repositories for this Project
https://github.com/inaciose/ackerbot_firmware
https://github.com/inaciose/ackerbot
https://github.com/inaciose/ackerbot_esp32
Dependências
https://github.com/inaciose/jetson_camera
sudo apt install ros-melodic-gps-common
sudo apt install ros-noetic-gps-common
Comandos básicos
roslaunch ackerbot free_drive.launch
Sessões
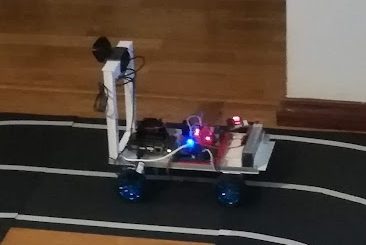
No dia 1 de Agosto de 2021 foram feitos os primeiros testes de condução autónoma do robot com direcção ackermann.
Testes de 24 de Agosto de 2021 no radiomaker.space.
Scripts e commandos usados
Comandos úteis
nmap -sn 192.168.1.0/24
sudo ip addr add 192.168.0.166/24 broadcast 192.168.0.255 dev ens33
Ligação a uma nova rede wifi
Login pela consola Serial do jetson nano por cabo FTDI, ligado aos pinos RX, TX & GND disponíveis por baixo do modulo (. . R T . . G . …)
Lista as redes wifi disponíveis
nmcli d wifi list
Ligar a um SSID com PASSWORD
sudo nmcli dev wifi connect SSID password PASSWORD
Adicionar um IP extra
nmtui
Usar a interface d o nmtui para adicionar o ip extra.
Eventualmente pode ser usado algo parecido com o comando abaixo
sudo ip addr add 192.168.0.64/24 broadcast 192.168.0.255 dev ens33
No computador remoto
source jnrosmaster.bash
jnrosmaster.bash
export ROS_MASTER_URI=http://192.168.1.64:11311
ROS mobile
http://wiki.ros.org/ROS-Mobile
https://github.com/ROS-Mobile/ROS-Mobile-Android
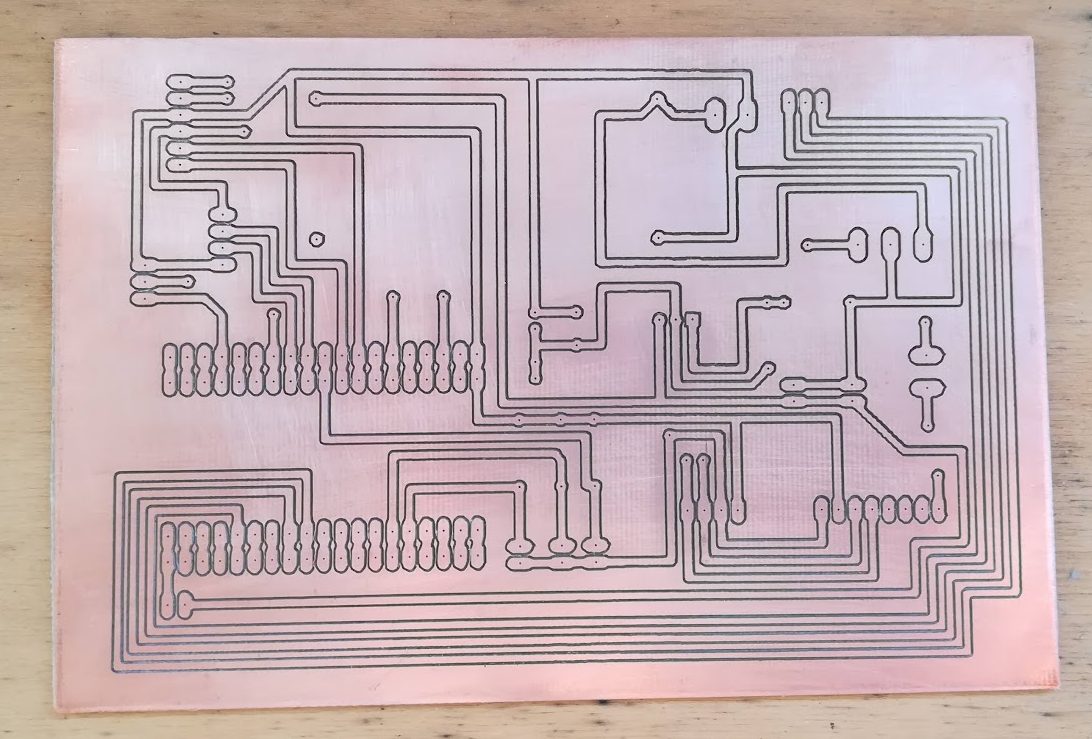
Experiencia na execução de PCBs com CNC3018
Design no eagle para nova placa para o microcontrolador.
Esquema – akbesp32v1-05-esquema
Board – akbesp32v1-05-board
Rosserial TCP
Quando o node rosserial estabelece ligação tcp com a o microcontrolador a correr um programa preparado para o rosserial é exibida a seguinte mensagem informativa do ip do microcontrolador.
[INFO] [1629761354.148552]: Established a socket connection from 192.168.1.136 on port 53589
Este ip pode ser usado para fazer o upload de um novo programa para o mcu por OTA.
Required packages
sudo apt install ros-melodic-usb-cam
sudo apt install ros-melodic-rosserial
pip3 install matplotlib
#Successfully installed cycler-0.10.0 kiwisolver-1.3.1 matplotlib-3.3.4 numpy-1.19.5 pillow-8.3.1 pyparsing-2.4.7 python-dateutil-2.8.2 six-1.16.0
pip3 install scikit-learn
#Successfully installed joblib-1.0.1 numpy-1.19.5 scikit-learn-0.24.2 scipy-1.5.4 threadpoolctl-2.2.0
#pip3 install imgaug
#ModuleNotFoundError: No module named ‘skbuild’
pip install scikit-build
#Successfully installed distro-1.5.0 packaging-21.0 pyparsing-2.4.7 scikit-build-0.11.1 setuptools-57.4.0 wheel-0.36.2
pip3 install imgaug
#Successfully installed Pillow-8.3.1 PyWavelets-1.1.1 Shapely-1.7.1 cycler-0.10.0 decorator-4.4.2 imageio-2.9.0 imgaug-0.4.0 kiwisolver-1.3.1 matplotlib-3.3.4 networkx-2.5.1$
pip3 install tensorflow
rosrun rosserial_python serial_node.py tcp
# important before run
source ~/catkin_build_ws/install/setup.bash –extend
# run basic
roslaunch ackerbot mlwrite_data_lanefollow.launch
roslaunch ackerbot mltraining_lanefollow.launch
roslaunch ackerbot mldriving_lanefollow.launch
https://github.com/espressif/esptool/wiki/ESP32-Boot-Mode-Selection
https://docs.platformio.org/en/latest/platforms/espressif32.html
https://github.com/peter-moran/jetson_csi_cam
Install gscam with gstreamer-1.0 support
cd ~/catkin_ws/src
git clone https://github.com/ros-drivers/gscam.git
cd ~/catkin_ws
catkin_make
https://github.com/sfalexrog/jetson_camera
roslaunch jetson_camera jetson_camera.launch