Resumo dos testes
Depois de acertar com as modificações para o mcu passar a subscrever apenas o pub_dir e pub_vel, e com o circuito ainda com a linha ao centro foram efectuadas 9 sessões de condução com recolha de dados (write). Posteriormente foi treinado o modelo rrm01.h5 com uma selecção das sessões.
Os resultados da condução autónoma foram muito desanimadores.

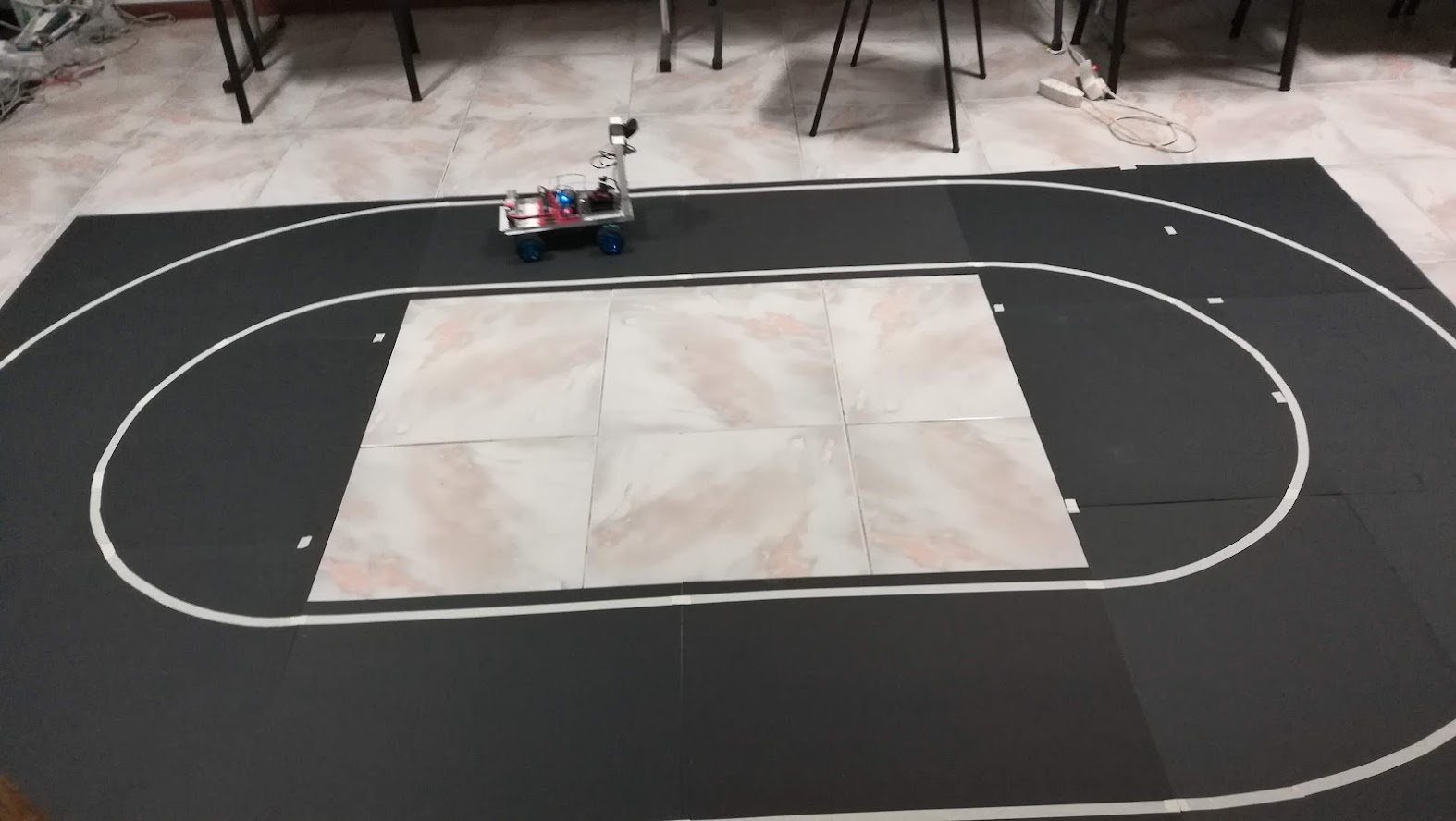
Retirei a fita cola que fazia de linha central e fiz mais uma serie de sessões de condução para recolha de dados,
Posteriormente com base nos dados de condução recolhidos foi treinados os modelos:
- rrm02.h5 (set 12)
- rrm02a.h5 (set 14)
- rrm02b.h5 (set 11)
- rrm02c.h5 (set 13)
A inexperiência de condução autonoma inicial com o modelo rrm02.h5, no mesmo sentido que foi efectuado o treino, também foi desanimadora.
No entanto, quando experimentei colocar o robot no sentido contrário os resultados melhoraram muito. O robot deu muitas voltas sem se despistar.
Com o modelo rrm02a.h5, o comportamento em sentido contrario foi bom, e no mesmo sentido foi ligeiramente melhor.
Os melhores resultados no mesmo sentido foram obtidos com o modelo rrm02c.h5, e não foram satisfatórios mas o desempenho no sentido contrário não foi o melhor.
A melhor situação será provavelmente a que foi obtida com o modelo rrm02a.h5.
Condições gerais dos testes
A camera estava inclinada o mais possível para baixo, a apontar para o mais perto do robot.
Velocidade de 0.15 M/s
Factor angular de 2
tamanho das imagens: 320 x 160
Software usado nos testes
https://github.com/inaciose/ackerbot_firmware/tree/a603cdecd182929d5878c34179876f9577fe9d89
https://github.com/inaciose/ackerbot/tree/8c3089886eb8cd15f8af7ec1eee050a3b7f1cb17