Video da base para carro robot com direção ackermann
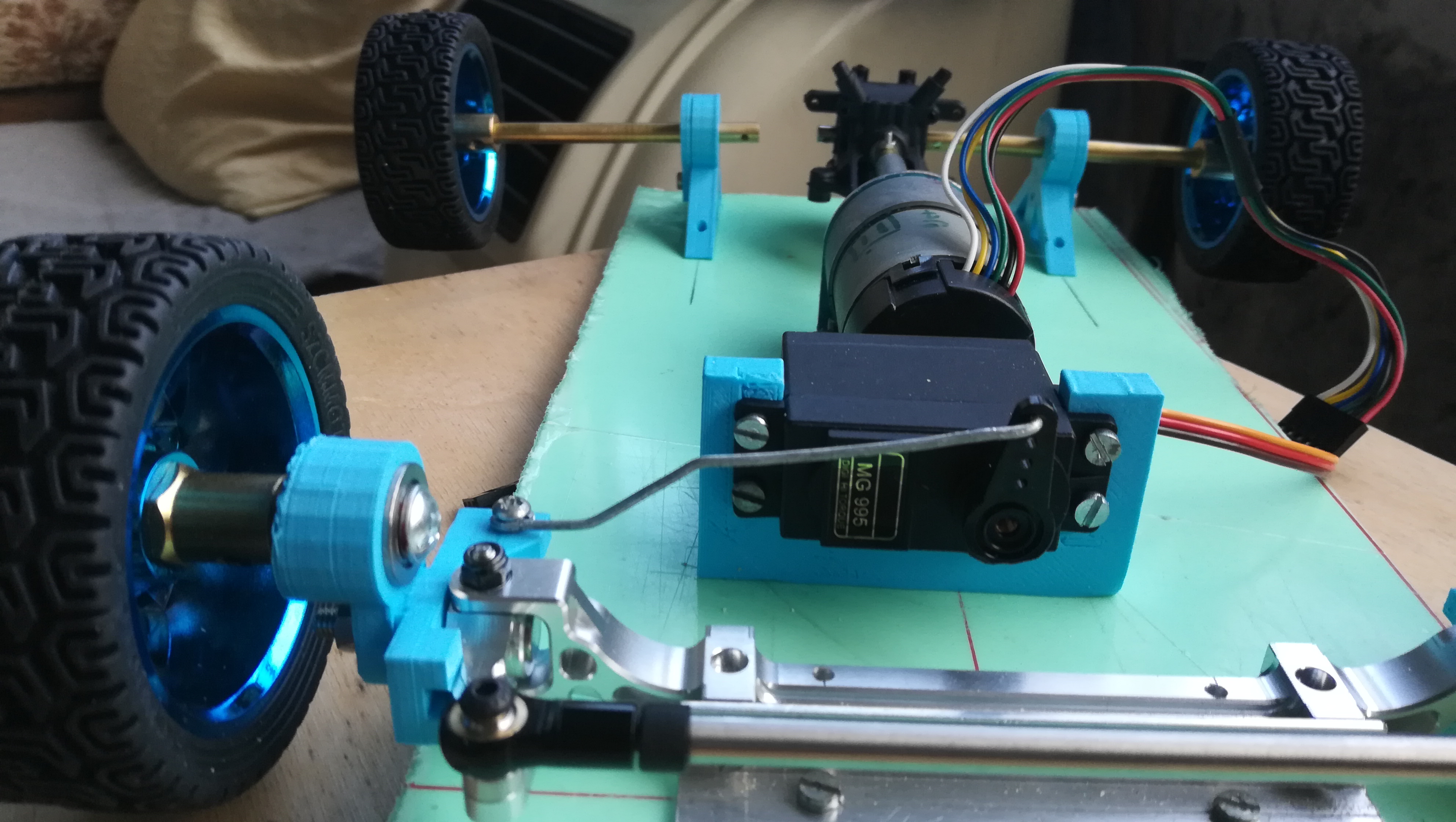
Numa primeira fase imaginei um robot com direção ackermann com um diferencial traseiro e um motor dc disposto de forma longitudinal relativamente ao chassis.
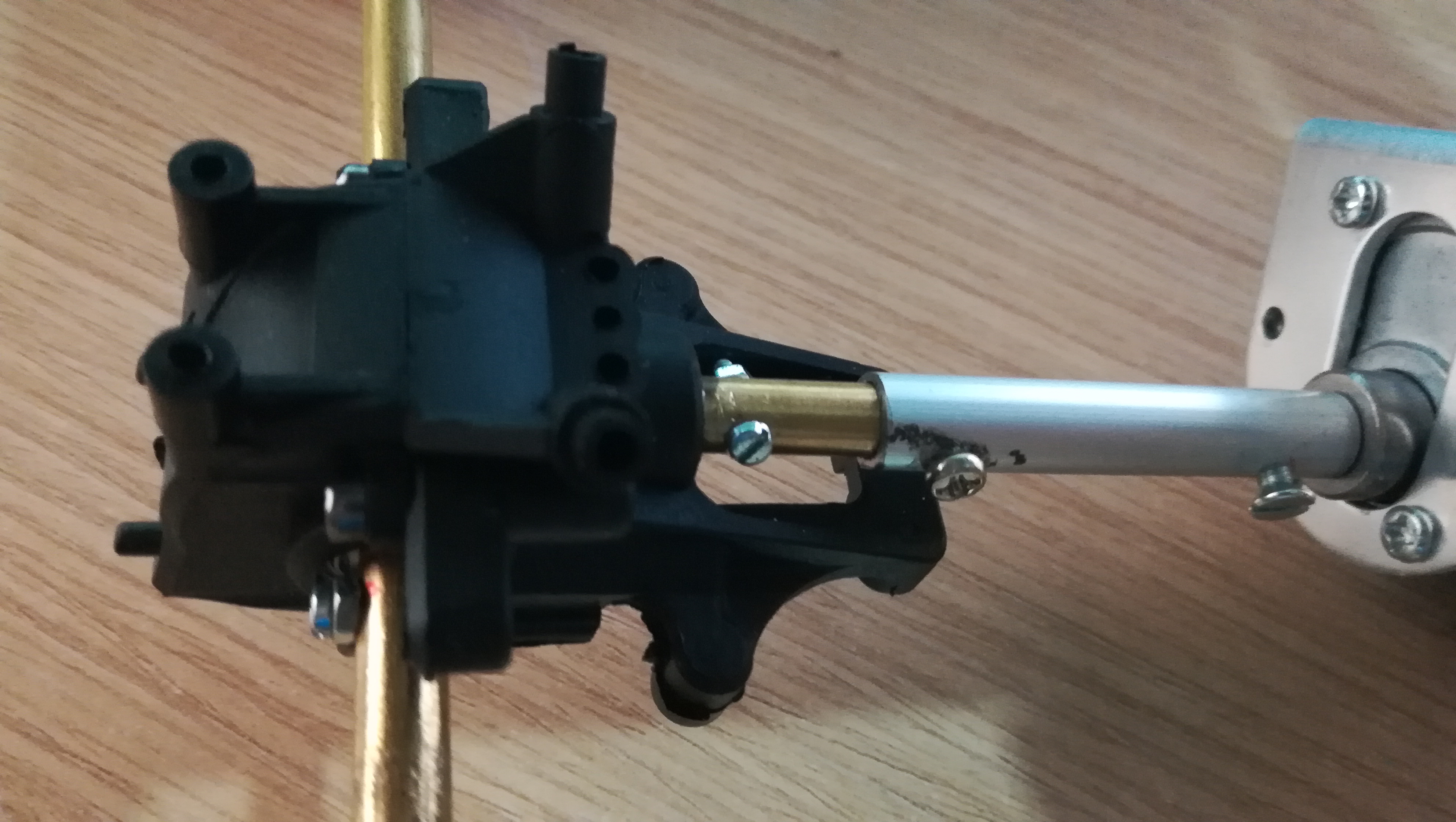
Para isso comprei no aliexpress um conjunto de peças que implementam uma direção ackermann, e um diferencial traseiro.
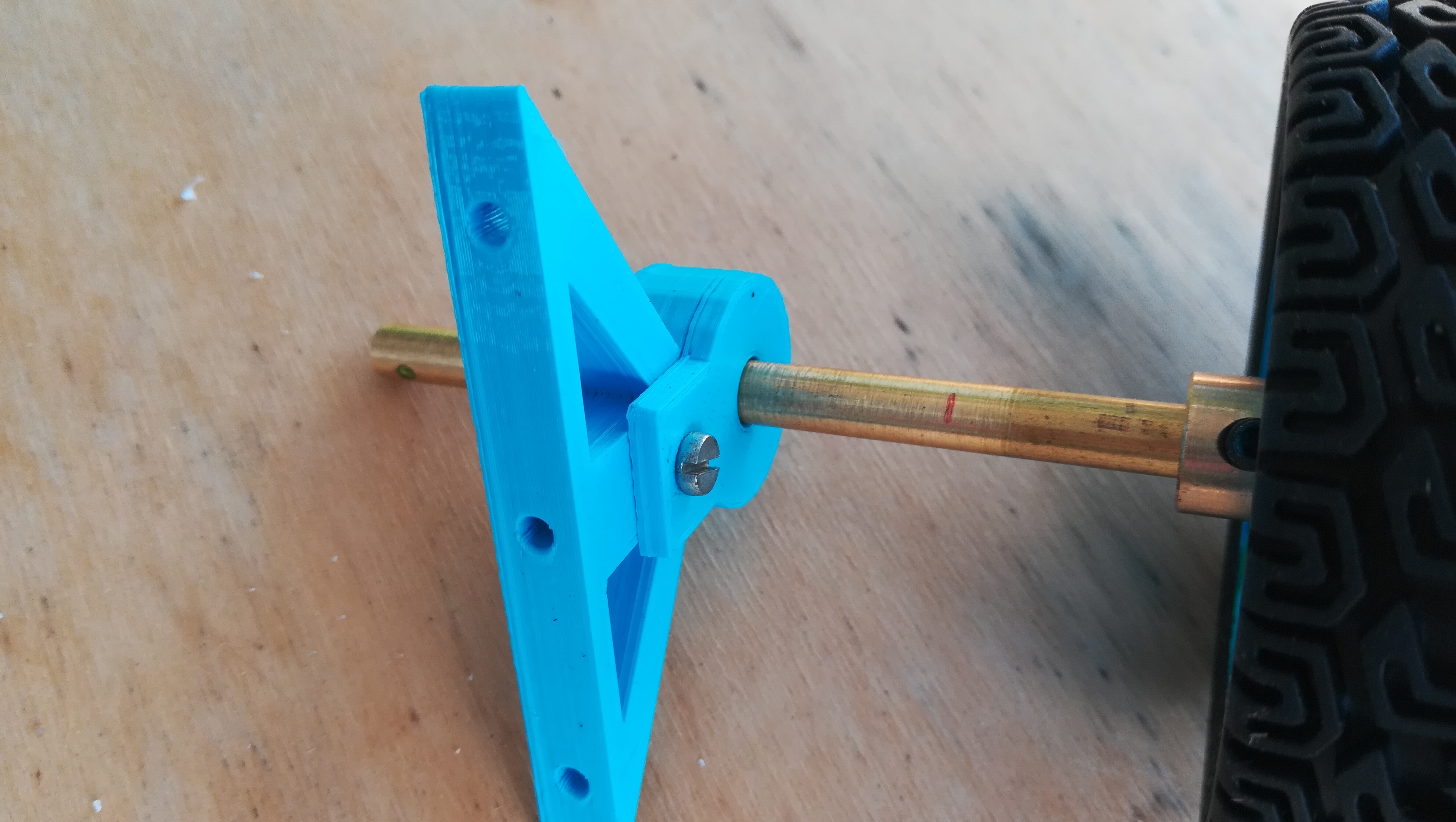
Numa impressora 3D fiz uns adaptadores (com rolamento) para as rodas da frente, e uns suportes de eixo (com rolamento) a aplicar com os eixos traseiros.