Este artigo é sobre a lista de materiais, o fabrico das partes mecânicas e montagem de um braço róbotico MK1.
As informações de base para este projecto estão disponíveis nos seguintes links:
- http://www.eezyrobots.it/eba_mk1.html
- https://www.instructables.com/id/EEZYbotARM/
- https://www.thingiverse.com/thing:1015238
A parte electrónica e o sofware de exploração serão abordados em artigos posteriores
Lista de materiais
Para além das peças que são produzidas na impressora 3D, este projecto necessita do seguinte material:
- 3 x servo Tower Pro MG90 (ou SG90) c/ acessórios
- 1 x servo Tower Pro SG90 c/ acessórios
- 4 x parafuso M3 de 8 mm (alternativa: 10 mm)
- 2 x parafuso M3 de 10 mm
- 2 x parafuso M3 de 15 mm
- 6 x parafuso M4 de 20 mm
- 1 x parafuso M4 de 25 mm
- 1 x parafuso M4 de 30 mm
- 8 x porca M3 auto bloqueante
- 8 x porca M4 auto bloqueante
- 20 x anilha M4
- 1 x varão roscado c/ 25 mm (alternativa: 1 x parafuso M4 de 20mm)
Parte 1: Impressão e preparação das peças em 3D
Lista de peças a imprimir em 3D efectuar o braço róbotico, incluindo a garra.
- 1 x EBA_01.00.001.STL
- 1 x EBA_01.00.002_vertical_drive_arm.STL
- 3 x EBA_01.00.003_link.STL
- 1 x EBA_01.00.004_forward_drive_arm.STL
- 1 x EBA_01.00.005_horizontal_arm.STL
- 1 x EBA_01.00.006_triangular_link.STL
- 2 x EBA_01.00.009_servo_plate.STL
- 1 x EBA_01.00.010_basement.STL
- 1 x EBA_01.00.011_round_plate.STL
- 1 x EBA_01.00.012_R01_claw_support.STL
- 1 x EBA_01.00.013_R01_right_finger.STL
- 1 x EBA_01.00.014_R01_left_finger.STL
- 1 x EBA_01.00.015_drive_gear.STL
- 1 x EBA_01.00.016_R01_driven_gear.STL
Peças adicionais que são apenas usadas na demonstração
- EBA_01.00.017_R01_ramp.STL
- EBA_01.00.018_maestro_holder.STL
- EBA_01.00.019_ball.STL
Parte 2: Montagem do braço robótico
A montagem do braço robótico é efectuada em cerca de 5 passos, e divide-se em três conjuntos, a base, as hastes e a garra.
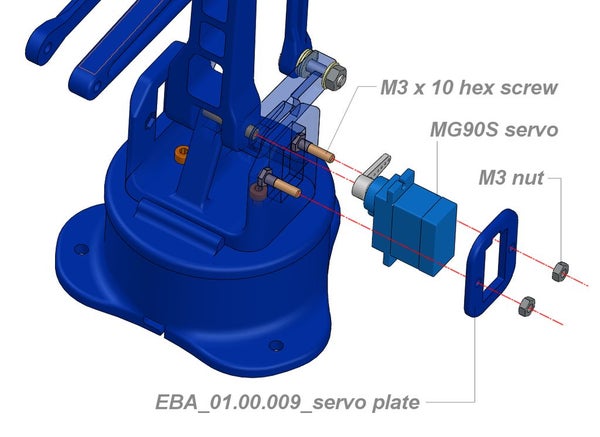
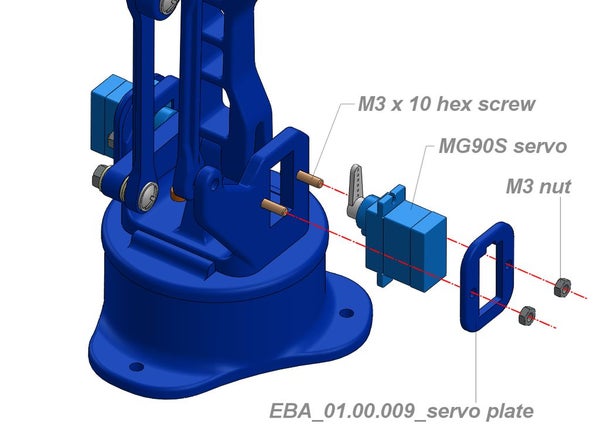
Passo 1 : montagem da base do braço robótico
Peças usadas:
- 1 x servo Tower Pro MG90 com acessórios
- 2 x parafusos M3 x 10 mm
- 2 x porcas M3 autobloqueante
- 001.STL
- 010_basement.STL
- 011_round_plate.STL
Primeiro fixa-se o servo à base (basement), com os parafusos que vêm como acessórios.
De seguida aplica-se o adaptador igual ao da imagem, e encaixa-se na base rotativa (round_plate). Fixa-se com um parafuso adequado(vem nos acessórios?).
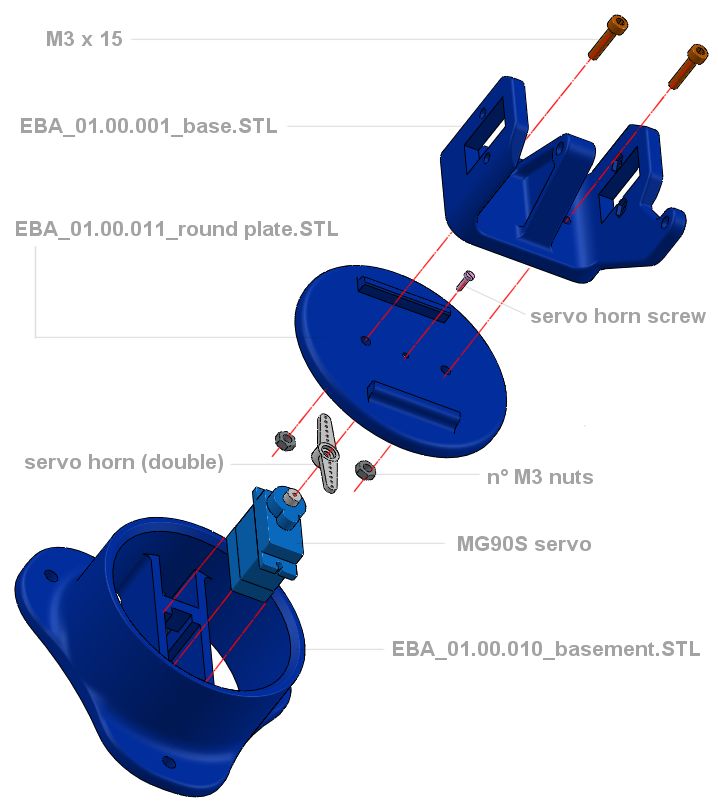
Por ultimo aplica-se o suporte das hastes (001) com os dois parafusos M3 x 10mm e as respectivas porcas M3.
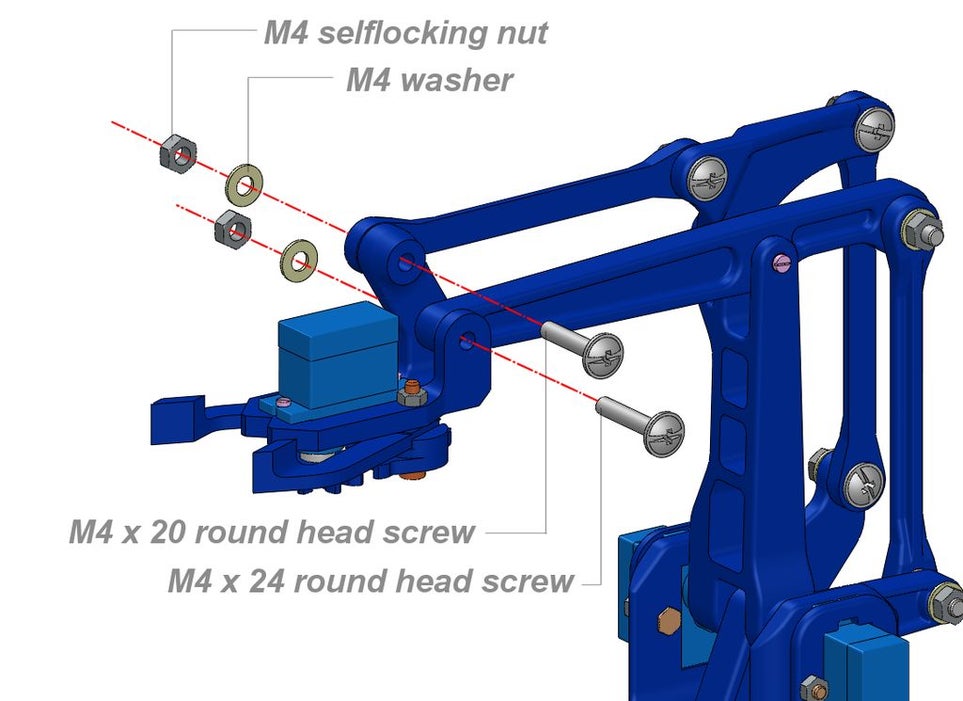
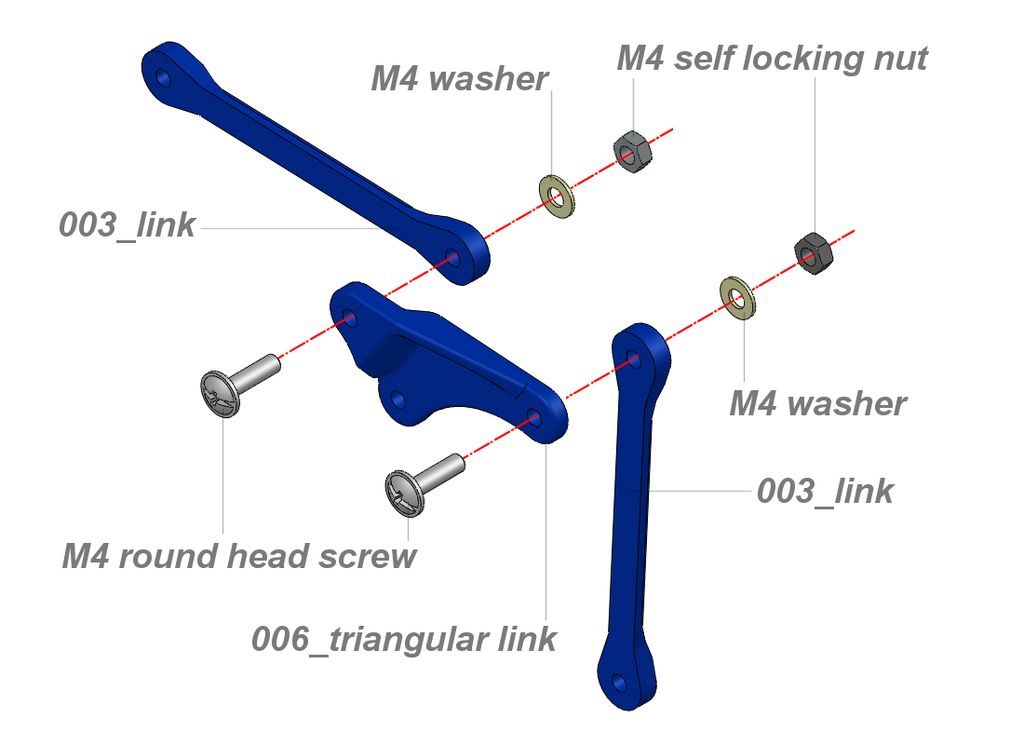
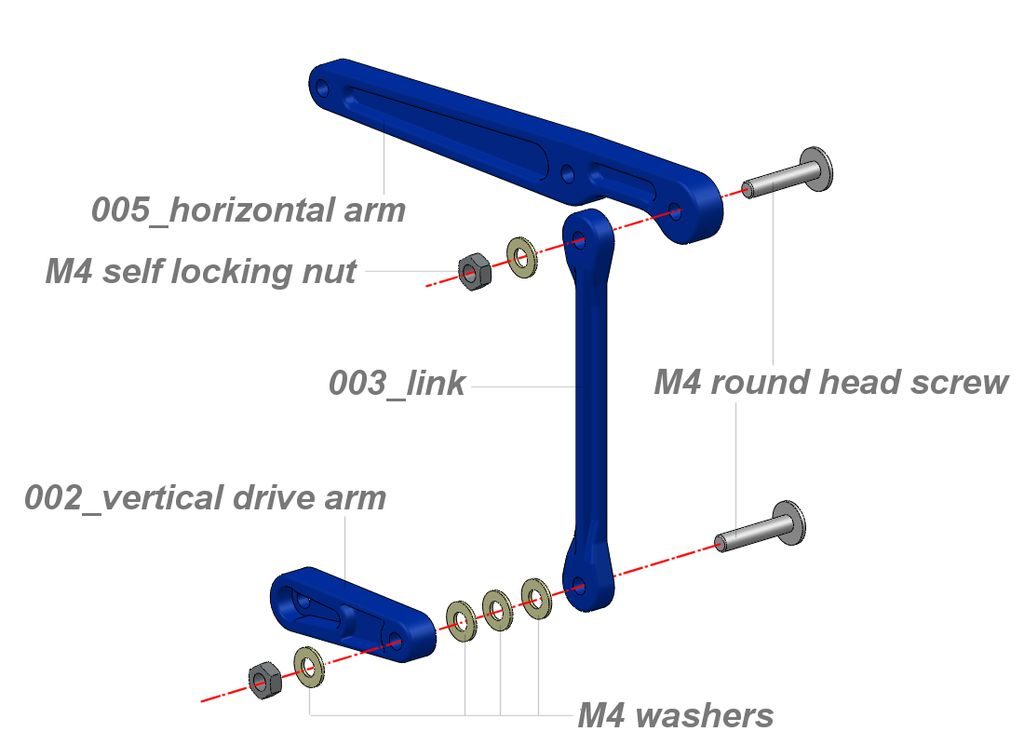
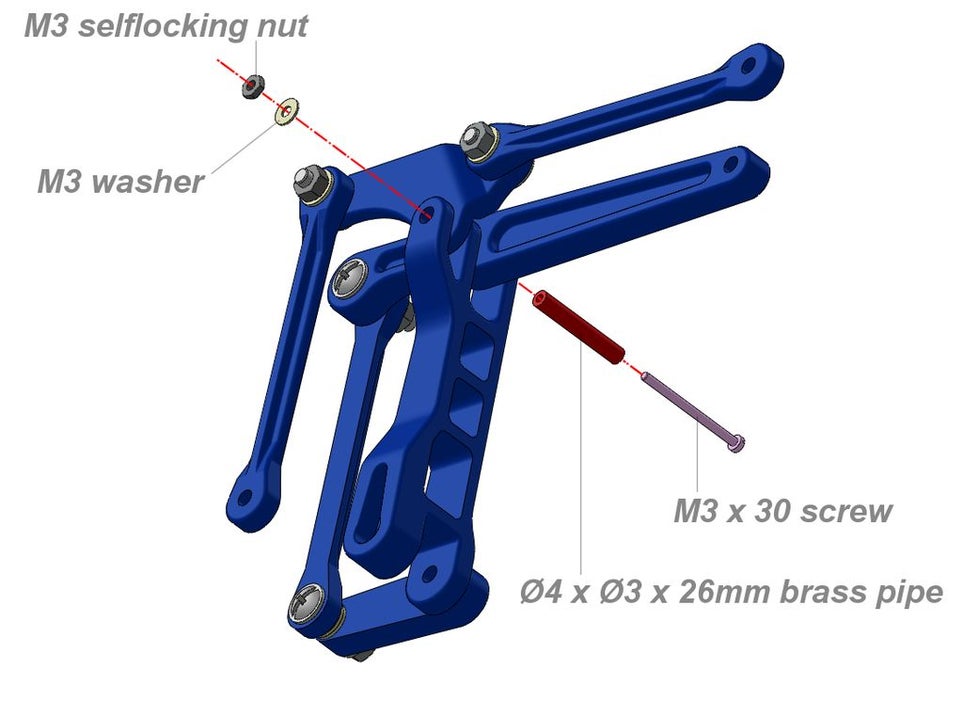
Passo 2: Montagem das hastes do braço robótico
Peças usadas
- 1 x EBA_01.00.002_vertical_drive_arm.STL
- 3 x EBA_01.00.003_link.STL
- 1 x EBA_01.00.004_forward_drive_arm.STL
- 1 x EBA_01.00.005_horizontal_arm.STL
- 1 x EBA_01.00.006_triangular_link.STL
- 5 x parafuso M4 de 20 mm
- 1 x parafuso M4 de 30 mm
- 6 x porca M4 auto bloqueante
- 16 x anilha M4
Devido ao numero de peças este passo tem várias fases.
Passo 3: Montagem da garra do braço robótico
Peças usadas:
- 1 x EBA_01.00.012_R01_claw_support.STL
- 1 x EBA_01.00.013_R01_right_finger.STL
- 1 x EBA_01.00.014_R01_left_finger.STL
- 1 x EBA_01.00.015_drive_gear.STL
- 1 x EBA_01.00.016_R01_driven_gear.STL
- 1 x servo Tower Pro MG90 com acessórios
- 2 x parafuso M3 de 15 mm
- 2 x porca M3 auto bloqueante

Passo 4: Montagem das hastes na base do braço robótico
Peças usadas:
- 1 x conjunto de hastes montadas (previamente montada)
- 1 x servo Tower Pro MG90 com acessórios

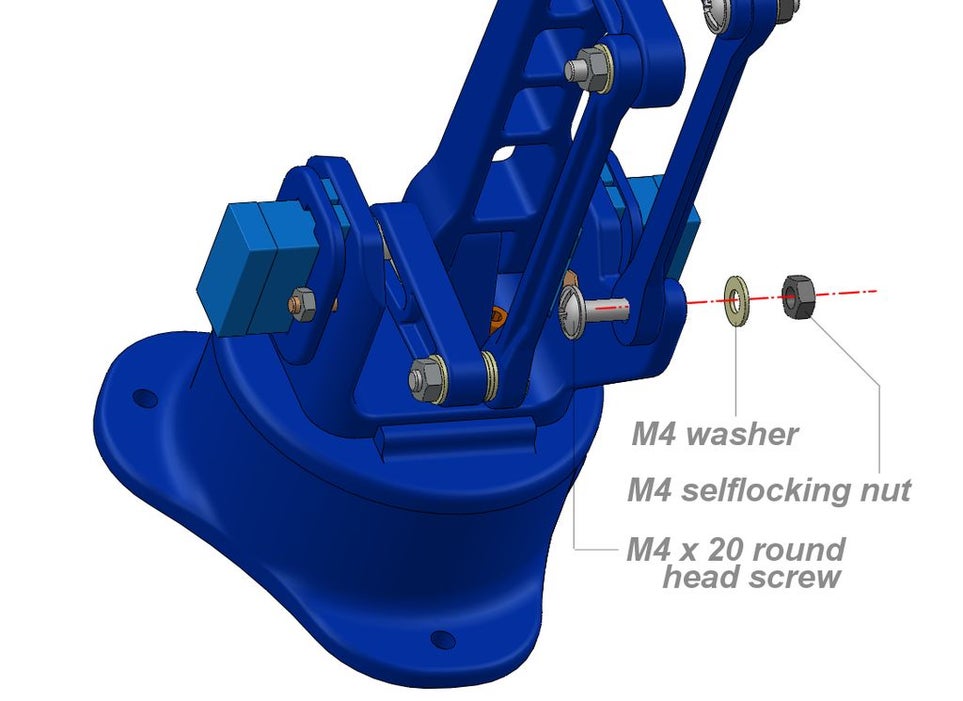
Passo 4: Montagem da garra nas hastes do braço robótico
Peças usadas:
- 1 x garra (previamente montada)
- 1 x parafuso M4 de 20 mm
- 1 x parafuso M4 de 25 mm
- 2 x porca M4 auto bloqueante
- 4 x anilha M4