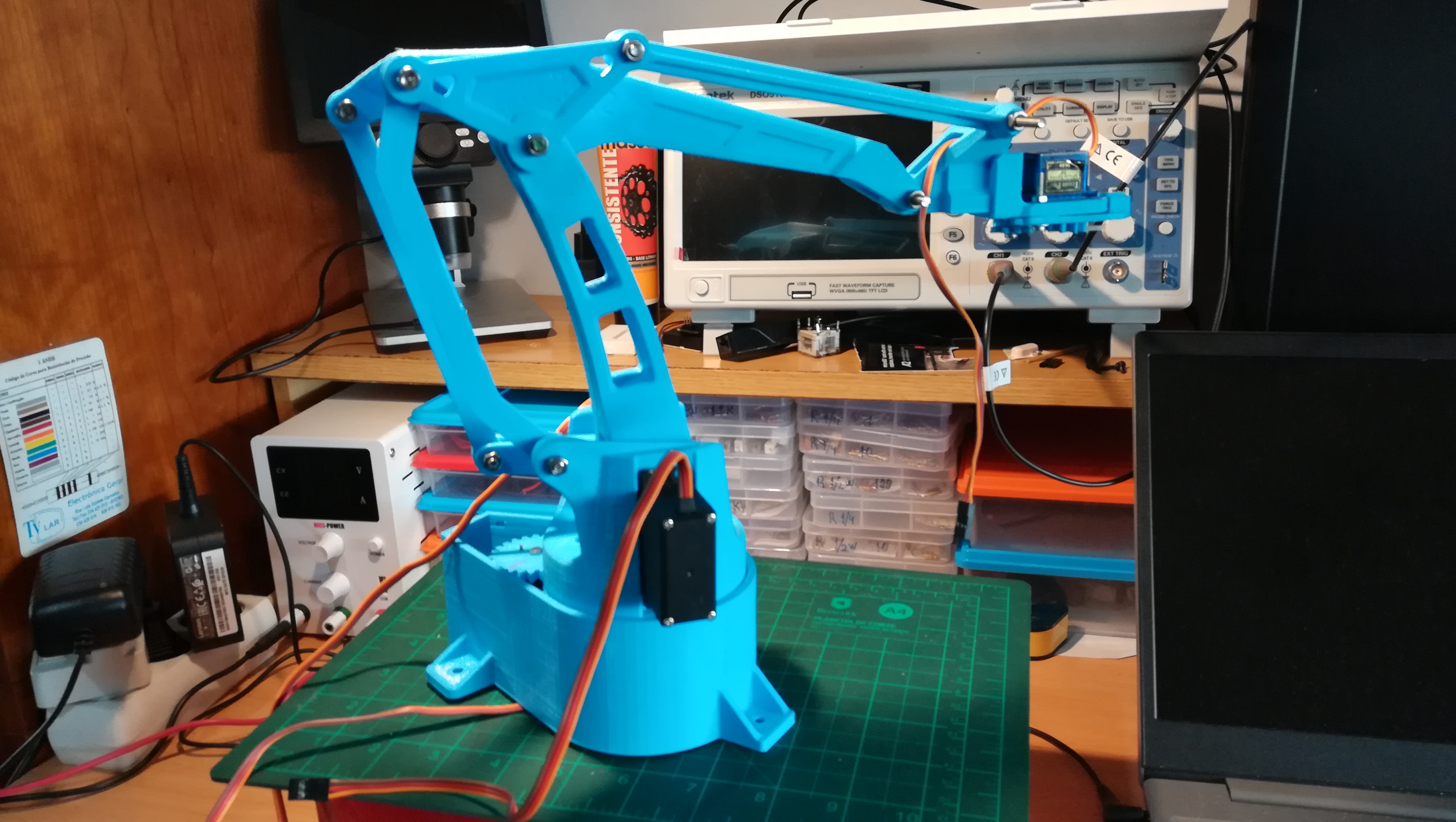
O EezyBotArm MK2 é a segunda versão da família de braços robóticos educativos EezyBotArm desenhados para serem fabricados em impressoras 3D e com instruções de montagem disponíveis na Internet.
A informação original do autor está disponível nos seguintes endereços:
- http://www.eezyrobots.it/eba_mk2.html
- https://www.thingiverse.com/thing:1454048
- https://www.instructables.com/id/EEZYbotARM-Mk2-3D-Printed-Robot/
No entanto, sendo este provavelmente o mais conhecido e bem sucedido braço da família de robots EezyBotArm, existe mais informação disponível na Internet para a montagem e exploração deste braço robótico do que para qualquer um dos outros.
Para a impressão e montagem do braço recolhi e publiquei informação em português, incluindo uma lista de materiais actualizada, no artigo sobre como Fazer o braço robótico EezyBotArm MK2.
Cinemática do eezyBotArm MK2
Devido ás suas características este braço é capaz de rodar apenas 90 graus, 45 para a sua direita, e 45 para a sua esquerda, e alcançar entre 7 cm e 24 cm a partir do seu eixo de rotação e 5 a 22 cm de altura.
Veja o seguinte artigo para saber mais sobre a: Cinemática do braço robot eezyBotArm MK2.
A parte de controlo seja ela hardware ou software está descrita, pelo próprio autor (ver links do autor do braço no inicio do artigo) ou em vários projectos em que o robot manipulador EezyBotArm MK2 é usado.
Integração do eezyBotArm MK2 com o ROS
https://github.com/SimBil91/coffee-bot
https://hotblackrobotics.github.io/en/blog/2018/01/17/ntbd-guide-part-I/
https://hotblackrobotics.github.io/it/blog/2018/02/14/sibot-cloud/
https://rospibot.azw.pt/wp-content/uploads/2020/04/eezyarm_APIEMS2019_paper_259.pdf