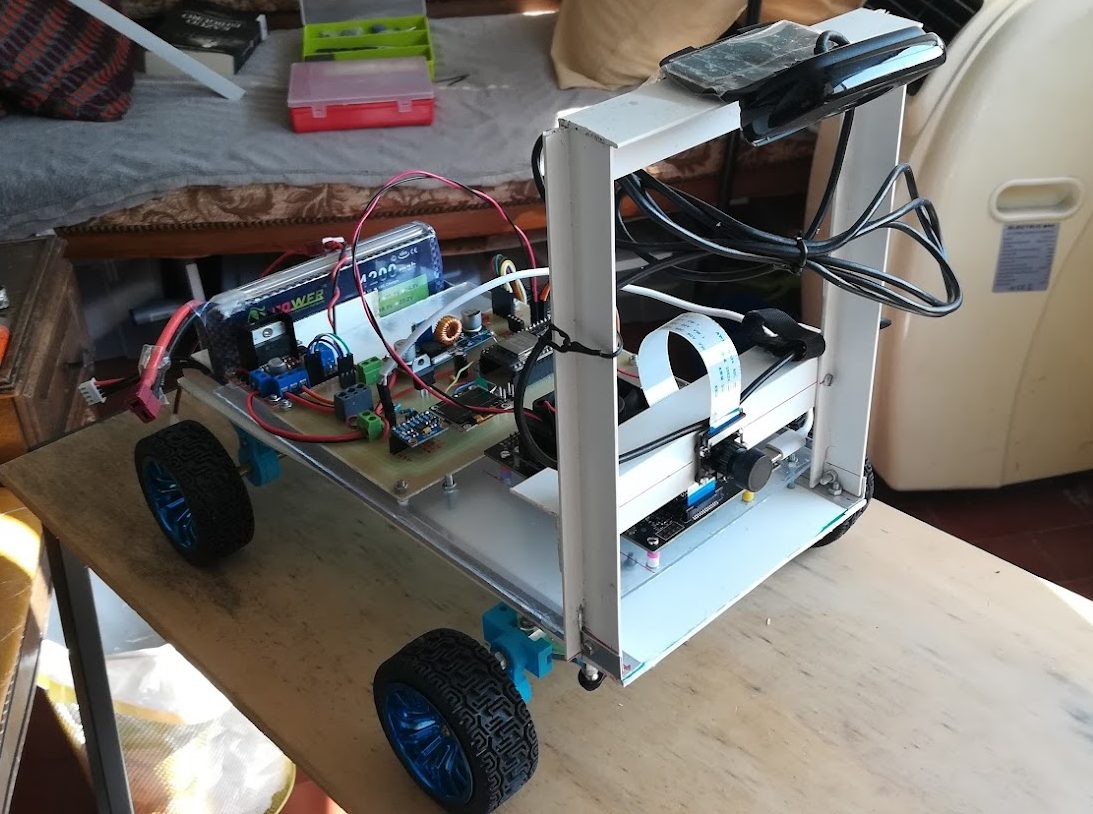
Yesterday, 27/08, i tried the upgraded ackerbot.
The new hardware version have the ESP8266 replaced by an ESP32, and new modules. An IMX219 camera, an IMU MPU6050, a smal OLED screen, connection available to a GPS (with basic software already tested on a breadboard), and an 3.3V power supply by an LM317T.
After some successfully preliminar tests, i try to free drive it to my living room, but i lost the robot control because the bad WiFi coverage.
After that event all my rosserial connections ended on error. See the terminal output bellow.
[INFO] [1630082983.539943]: Setup subscriber on pub_vel [std_msgs/Int16] [WARN] [1630082997.385001]: Last read step: data checksum [WARN] [1630082997.389949]: Run loop error: [Errno 104] Connection reset by peer [INFO] [1630082997.395216]: Removing subscriber: pub_dir [INFO] [1630082997.405242]: Removing subscriber: pub_vel [INFO] [1630082997.413336]: Removing subscriber: cmd_vel [INFO] [1630082997.421426]: Shutting down [INFO] [1630082997.425133]: All done Traceback (most recent call last): File "/opt/ros/melodic/lib/rosserial_python/serial_node.py", line 73, in <module> server.listen() File "/opt/ros/melodic/lib/python2.7/dist-packages/rosserial_python/SerialClient.py", line 253, in listen self.startSerialClient() File "/opt/ros/melodic/lib/python2.7/dist-packages/rosserial_python/SerialClient.py", line 259, in startSerialClient client.run() File "/opt/ros/melodic/lib/python2.7/dist-packages/rosserial_python/SerialClient.py", line 556, in run self.port.flushOutput() AttributeError: RosSerialServer instance has no attribute 'flushOutput'
Today, the first connection, is successfully and stable. I believe that the yesterday issues are due to the wifi connections.
My home have a WiFi extender. The extender have the _EXT suffix on the ssid. If the main ssid is myssid, the extender have myssid_EXT.