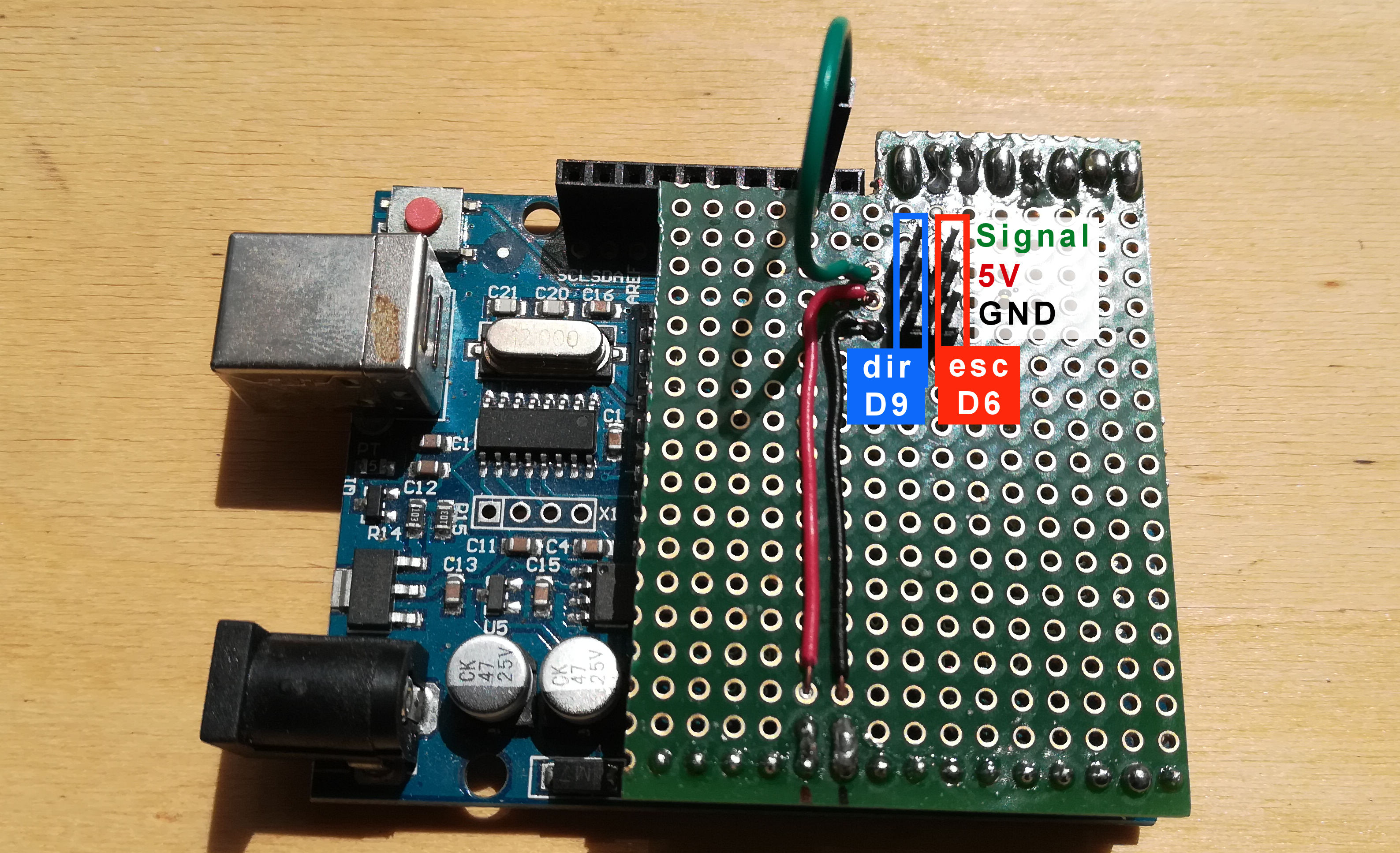
O Traxxas Arduino Shield foi feito para substituir a placa branca aplicada no robot. É muito simples pois o único objetivo foi eliminar a placa branca e a maior parte dos fios existentes.
O shield encaixa em parte dos headers do Arduino Uno e permite encaixar os fios de ligação do esc dos motores e do servo da direção nuns conectores de 3 pinos.
A forma de ligar o esc e o servo ao shield está ilustrada na imagem. É de notar que se bem que o sinal do conector destinado ao esc está sempre ligado ao pino D6 do arduino, o sinal do conector destinado ao servo, tem de ser ligado, com o fio verde, ao pino D9.
O shield tem espaço para possíveis desenvolvimentos, entre os quais a colocação de um condensador na alimentação (GND e 5V)
A imagem indica claramente as ligações a efectuar.
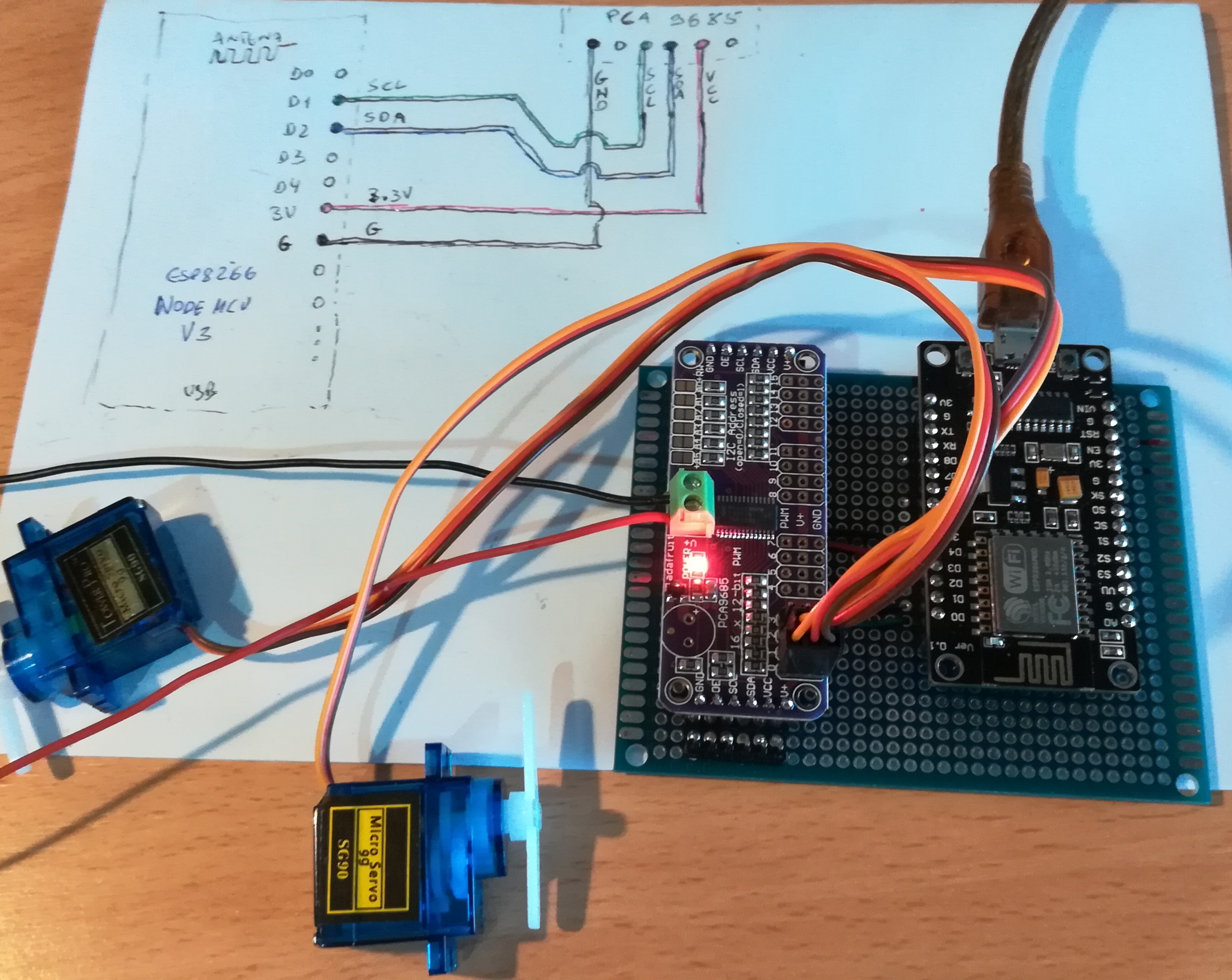
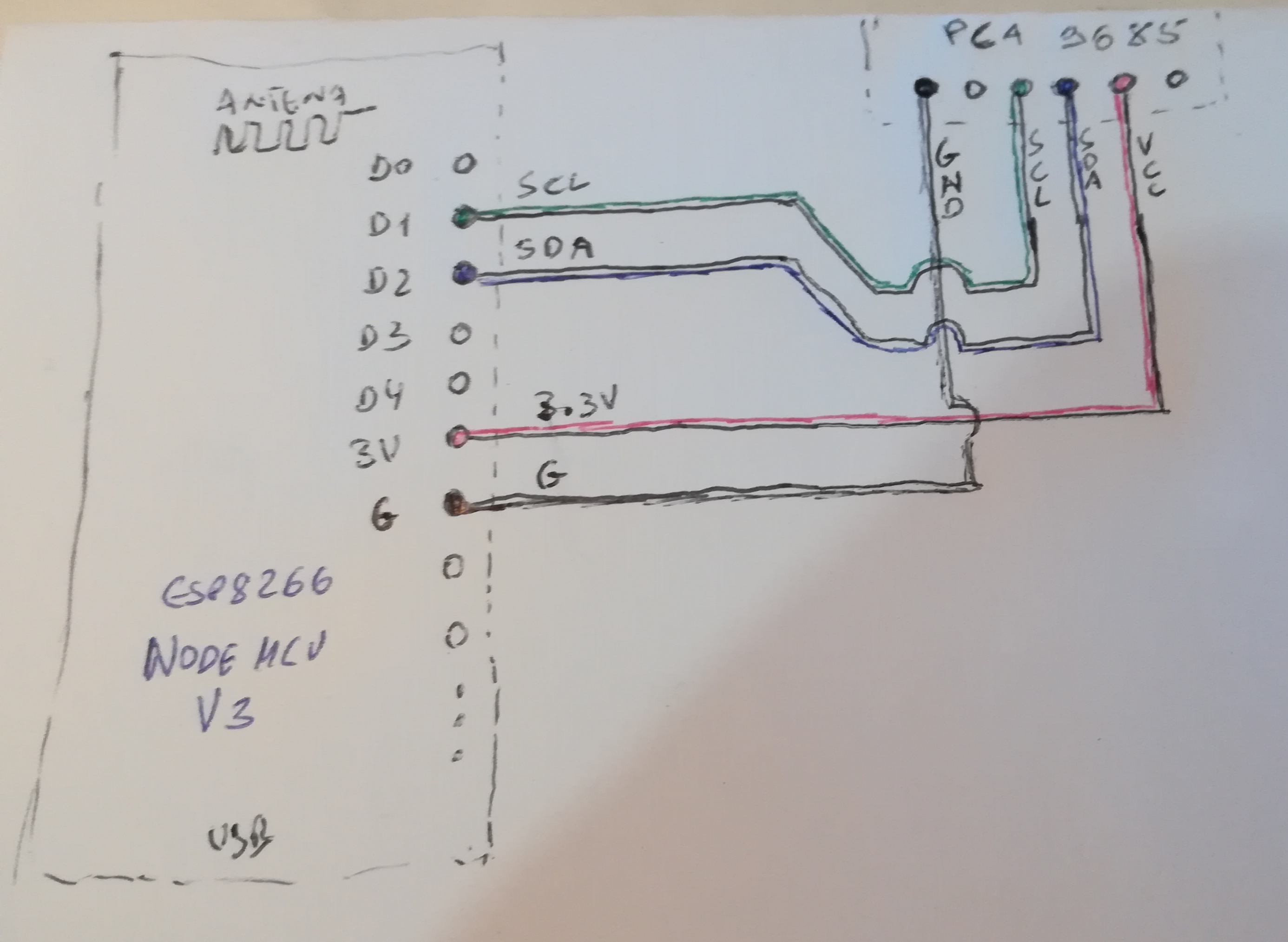
Firmware de controlo comROS do servo da direcção e do ESC de um rover traxxas,para um ESP8266 nodeMCU V3 com um PCA9685.
Usado no rover traxxas do Automec – Universidade de Aveiro
O firmware subscreve os tópicos:
pub_dir, (angulo de direcção entre -90º e 90º a aplicar ao servo)
pub_vel (velocidade expressa entre |0, 90| sendo o seu sinal indicador da direcção, o negativo é marcha atrás)
Pode ser expandido para controlar também o servo do diff. traseiro e do diff. dianteiro.
ESP8266 (micontrolador de 32bits com wifi integrado);
PCA9685 (gerador de PWM de 12bits e 16canais)
IDE: platformIO,
Board: ESP8266 nodeMCU 12E
Na primeira fase está implementado o controlo do ESC e do servo da direcção.
A ligação do firmware aos node ROS depende do pacote rosserial.
Caso não esteja instalado, pode-se instalar com o seguinte comando (substituir noetic, pela identificação da distribuição do ROS):
sudo apt install ros-noetic-rosserial
Depende de um node que publique mensagens twist nos tópicos apropriados. Como por exemplo o node: linang_to_ackermann.py.
O node deve ser lançado com a seguinte configuração
message_type:=physical
O node pode ser configurado para dois tipos de input,:
train:=1 (subscreve um único tópico twist com velocidade angular e linear)
train:=0 (pré-definido, subscreve dois tópicos twist, um com velocidade angular, e outro com a velocidade linear)
Identificação da porta serie a usar na comunicação
~$ dmesg
[12722.986709] usbserial: USB Serial support registered for ch341-uart
[12722.986727] ch341 1-1:1.0: ch341-uart converter detected
[12722.987254] usb 1-1: ch341-uart converter now attached to ttyUSB0
Exemplos de exploração do sistema
Cada um dos comandos deve ser lançado num terminal independente
Exemplo de exploração em modo real e autónomo com o node linang_to_ackermann.py (usando um launch file)
Para ligar a Microsoft Kinect 360 ao computador é necessário ter um adaptador que consiste num transformador, um connector (onde vai ligar o cabo da Kinect 360) e um cabo com USB que sai da caixa do connector e vai ligar a uma porta USB no computador.
dav
Os testes foram efectuados num portatil Lenovo IdeaPad S145, com o Linux Ubuntu Bionic (18.04)
Informações sobre a distro
~$ lsb_release -a
No LSB modules are available.
Distributor ID: Ubuntu
Description: Ubuntu 18.04.4 LTS
Release: 18.04
Codename: bionic
Informações sobre o kernel
~$ uname -a
Linux ideapad 5.4.0-66-generic #74~18.04.2-Ubuntu SMP Fri Feb 5 11:17:31 UTC 2021 x86_64 x86_64 x86_64 GNU/Linux
Informções USB da Kinect 360
~$ lsusb
Bus 001 Device 010: ID 045e:02ae Microsoft Corp. Xbox NUI Camera
Bus 001 Device 008: ID 045e:02b0 Microsoft Corp. Xbox NUI Motor
Bus 001 Device 009: ID 045e:02ad Microsoft Corp. Xbox NUI Audio
Exploração da Kinect 360 no linux sem o ROS
Podemos explorar a kinect fora do ros com o pacote libfreenect-bin. Este pacote pode ser instalado usando o apt.
Instalação no ubuntu do libfreenect-bin, ou do freenect, que o inclui.
sudo apt install freenect
Depois de instalado podemos executar um programa de exploração da kinect 360.
~$ freenect-glview
Este comando apresenta uma janela com a imagem da deep camera do lado esquerdo e uma imagem da camara rgb do lado direito.
Além disso permite controlar alguns aspectos da kinect, nomeadamente o controlo da inclinação. Os comandos disponiveis são os seguintes:
‘w’ – tilt up, ‘s’ – level, ‘x’ – tilt down,
‘0’-‘6’ – select LED mode,
‘+’ & ‘-‘ – change IR intensity
‘f’ – change video format, ‘m’ – mirror video,
‘o’ – rotate video with accelerometer
‘e’ – auto exposure, ‘b’ – white balance,
‘r’ – raw color, ‘n’ – near mode (K4W only)
Saida na consola após a execução do comando
Kinect camera test
Number of devices found: 1
GL thread
[Stream 70] Negotiated packet size 1920
write_register: 0x0105 <= 0x00
write_register: 0x0006 <= 0x00
write_register: 0x0012 <= 0x03
write_register: 0x0013 <= 0x01
write_register: 0x0014 <= 0x1e
write_register: 0x0006 <= 0x02
write_register: 0x0017 <= 0x00
[Stream 80] Negotiated packet size 1920
write_register: 0x000c <= 0x00
write_register: 0x000d <= 0x01
write_register: 0x000e <= 0x1e
write_register: 0x0005 <= 0x01
[Stream 70] Lost 240 total packets in 0 frames (inf lppf)
[Stream 70] Lost 270 total packets in 0 frames (inf lppf)
write_register: 0x0047 <= 0x00
(...)
A exploração do audio pode ser efectuada com o comando:
freenect-micview
No entanto o teste, conforme se pode verificar nas mensagens exibidas abaixo, correu mal.
~$ freenect-micview
Number of devices found: 1
Trying to open ./audios.bin as firmware...
Trying to open /home/inaciose/.libfreenect/audios.bin as firmware...
Trying to open /usr/local/share/libfreenect/audios.bin as firmware...
Trying to open /usr/share/libfreenect/audios.bin as firmware...
Trying to open ./../Resources/audios.bin as firmware...
upload_firmware: failed to find firmware file.
upload_firmware failed: -2
This is the libfreenect microphone waveform viewer. Press 'q' to quit or spacebar to pause/unpause the view.
audio: invalid magic in iso IN packet: 00000000
Pelos vistos o problema é que não consegue encontrar o ficheiro com o firmware (audios.bin).
Uma pesquisa na web referiu a necessidade de executar o scritp fwfetcher.py para gerar o ficheiro audio.bin, que posteriormente deve ser copiado para uma das localizações acima.
Tentei resolver o assunto instalando o pacote python-freenect com o seguinte comando, mas não resolveu.
sudo apt install python-freenect
Terei que pesquisar melhor este assunto mais tarde.
Exploração da Kinect 360 no ROS
As potencialidades da kinect 360 podem ser exploradas no ros com uma coleção de pacotes que podem ser instalados com o apt.
Pelos vistos existem há pelo menos duas soluções para a integração da kinect 360 no ROS melodic, uma baseada no openni e outra no freenect.
Nas minhas experiencias anteriores tinha instalado o pacote freenect para o ros, no entanto o pacote libfreenect para o ros melodic não está disponvel no ubunto bionic. pelo menos quando o tentamos instalar com o comando:
sudo apt install ros-melodic-libfreenect
Aparece o seguinte erro:
E: Unable to locate package ros-melodic-libfreenect
Pelos vistos, e conforme exibido na pagina do pacote, o pacote libfreenect está apenas disponivel para o ros Kinectic.
http://wiki.ros.org/libfreenect
A pesquisa dos pacotes disponiveis cujo nome inclui libfreenect revelou algumas opções
No entanto a descrição ‘A libfreenect-based ROS driver for the Microsoft Kinect’ é exactamente nas duas o que não ajuda muito, mas ambos tem uma página que os descreve na wiki do ROS, que já referi acima, e nela descobri que o freenect-camera faz parte do freenect-stack.
Indeciso sobre se devia instalar o pacote libfreenect-stack, resolvi experimentar se o seguinte comando funcionava (e funcionou).
roslaunch openni_launch openni.launch
O comando devolve algumas informações sobre a kinect e publicando alguns topicos que podem ser usados no rviz
[ INFO] [1615640624.323407153]: Number devices connected: 1
[ INFO] [1615640624.323701914]: 1. device on bus 001:10 is a SensorV2 (2ae) from PrimeSense (45e) with serial id 'A00361A02199045A'
[ INFO] [1615640624.324962821]: Searching for device with index = 1
[ INFO] [1615640624.372737787]: Opened 'SensorV2' on bus 1:10 with serial number 'A00361A02199045A'
[ INFO] [1615640624.406604267]: rgb_frame_id = 'camera_rgb_optical_frame'
[ INFO] [1615640624.406676036]: depth_frame_id = 'camera_depth_optical_frame'
[ WARN] [1615640624.412769205]: Camera calibration file /home/inaciose/.ros/camera_info/rgb_A00361A02199045A.yaml not found.
[ WARN] [1615640624.412859410]: Using default parameters for RGB camera calibration.
[ WARN] [1615640624.412937672]: Camera calibration file /home/inaciose/.ros/camera_info/depth_A00361A02199045A.yaml not found.
[ WARN] [1615640624.412998888]: Using default parameters for IR camera calibration.
Kinect 360 com openni no rviz
A exploração da kinect 360 no rviz pode ser efectuada recorrendo aos seguintes displays:
Image
Camera
Pointcloud2
DeepCloud
Os dois ultimos displays, têm configurações para atribuir cores aos pontos, sobreposição de imagem com a camera rgb, etc.
ros-melodic-freenect-stack
Numa primeira parte descrevo a instalação e a exploração da solução openni, que era a que conhecia.
Kinect 360 com o ros freenect-stack no ubuntu bionic
Nesta segunda parte descrevo a instalação e a exploração da soluçãofreenect-stack, que no decorrer deste processo me apercebi que é uma alternativa a solução baseada em openni.
A instalação do software necessário no ros é efectuada com o apt
sudo ros-melodic-freenect-stack
Decidi não instalar neste computador. Eventualmente vou tentar a instalação mais tarde no ros noetic.
Apendice
Tópicos publicados pelos programas lançados pelo comando: