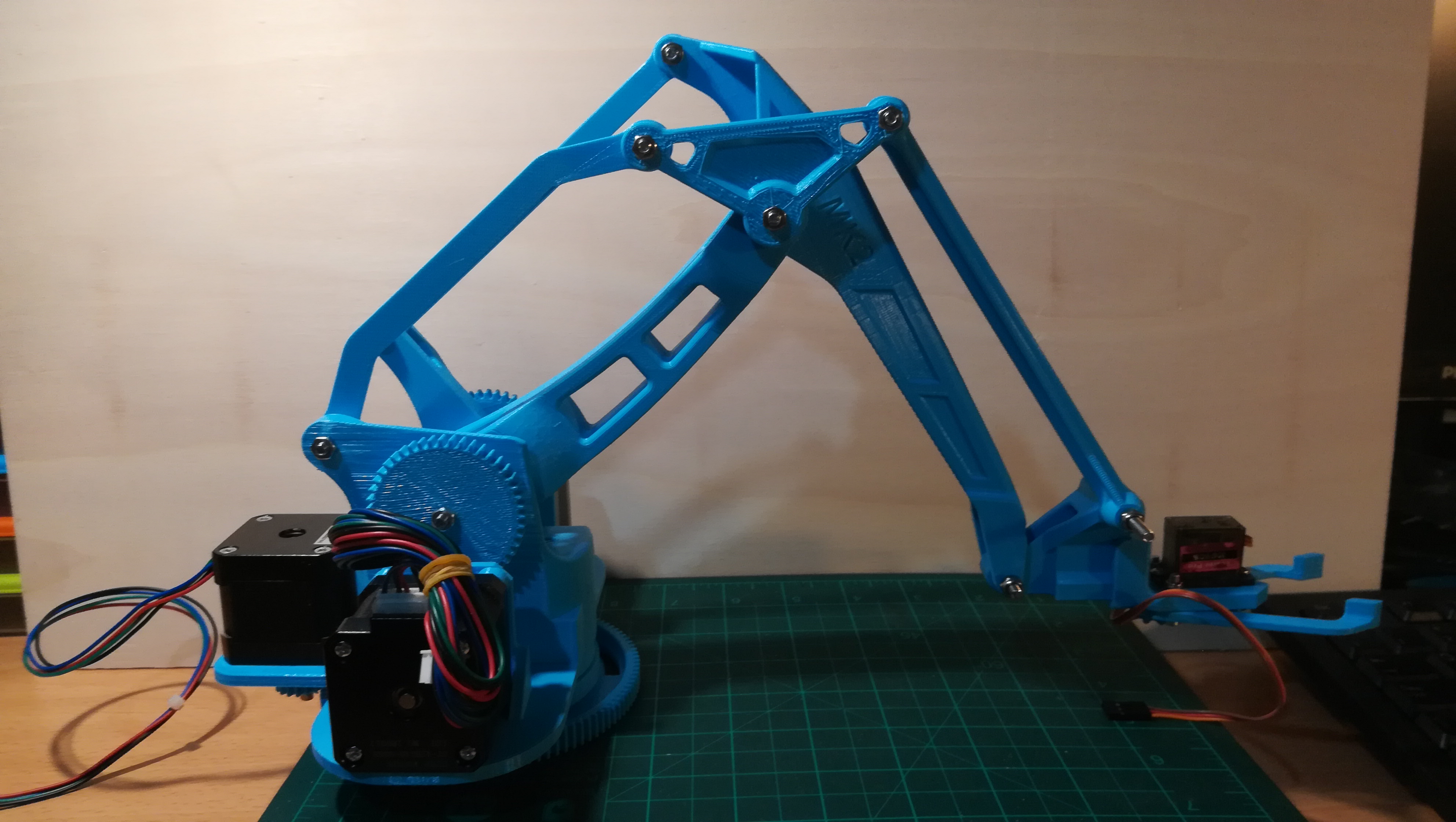
Depois de ter fabricado duas versões do braço robótico eezyBotArm, a MK1 e a MK2 sem ter obtido os resultados desejados, em nenhuma delas tentei uma variante do MK2, encontrei no mesmo site, mas com steppers motors em vez de servos que. O Robot Arm MK2 Plus.
O robot manipulador Robot Arm MK2 Plus tem informação original de fabrico disponível nos seguintes endereços:
- https://www.thingiverse.com/thing:2520572
- https://www.instructables.com/id/Robot-Arm-MK2-Plus-Stepper-Motor-Used/
Este artigo tem como objecto a construção do braço do ponto de vista mecanico, incluindo os actuadores. A parte electrónica e o software de controlo não estão contemplados.
Lista de componentes do Robot Arm MK2 Plus (BOM)
Na informação disponível na Internet não descobri a lista de componentes. Esta lista foi o resultado das minhas escolhas. Alguns dos componentes podem ser substituídos por outros.
Componentes comprados para o Robot Arm MK2 Plus
Motores
- 3 x Mortor de passos (Steppers) Nema 17 – 42HS40
- 1 x Motor servo Tower Pro SG90
Varão roscado
- 1 x M4 x 80 mm
- 1 x M4 x 60 mm
Parafusos
Com excepção do indicado em parafuso específicos, o tipo de cabeça pode ser sextavada, fenda ou Philips.
- 5 x M3 x 8 mm
- 8 X M3 x 10 mm (cabeça sextavada externa)
- 1 x M3 x 15 mm
- 1 x M3 x 20 mm
- 2 x M3 x 60 mm
- 5 x M4 x 20 mm
- 1 x M4 x 35 mm
- 1 x M4 x 50 mm
- 1 x M6 x 25 mm
Porcas
- 3 x M3
- 2 x M3 auto-bloqueante
- 11 x M4 auto-bloqueante
- 1 x M6 auto-bloqueante
Anilhas
- 1 x M6
Esferas
10 x 5 mm (plastico ou metal, tb podem ser impressas)
Componentes impressos em 3D para Robot Arm MK2 Plus
Os ficheiros STL para imprimir os componentes estão disponíveis no endereço acima (thingverse). Segue uma relação dos componentes que é necessário imprimir.
Necessários
- 1 x Base_Arm.STL
- 1 x Base_Bearing_Holder.STL
- 1 x EBAmk2_002_mainarm.STL
- 1 x EBAmk2_003_varm.STL
- 1 x EBAmk2_004_link135.STL
- 1 x EBAmk2_005_link135angled.STL
- 1 x EBAmk2_006_horarm__.STL
- 1 x EBAmk2_007_trialink.STL
- 1 x EBAmk2_008_link147_new.STL
- 1 x EBAmk2_009_trialinkfront.STL
- 1 x EBAmk2_014_claw_base.STL
- 1 x EBAmk2_015_claw_finger_dx.STL
- 1 x EBAmk2_016_claw_gear_drive.STL
- 1 x EBAmk2_017_claw_finger_sx.STL
- 1 x EBAmk2_018_claw_gear_driven.STL
- 1 x gear1.STL
- 1 x gear2.STL
- 1 x Robot_Base_Low.STL
- 1 x Robot_Base_Low_Gear.STL
- 3 x Stepper_Gear.STL
Opcionais
- Base_Bearing_Ball.STL (esfera de 5 mm)
- finalholder.STL
Alternativos
- claw_finger_long_dx.stl
- claw_finger_long_sx.stl
- stepper-screw-spacer.stl (finalholder.STL)
Não necessários
- EBAmk2_006_horarm_plate.STL
- EBAmk2_006_horarm__.gcode
- Robot_Asm.STL (aspecto geral do robot manipulador)
- screw_holder1.STL
- screw_holder2.STL
- Left_gear.STL
- Base_Bearing_Ball.STL
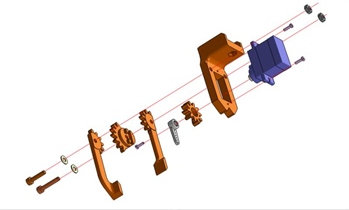
Montagem do braço manipulador Robot Arm MK2 Plus
Depois de adquiridas e impressas as peças chegou a hora de montar o braço Robot Arm MK2 Plus. O procedimento é relativamente simples. Esta é a minha sugestão de montagem para o braço manipulador.
Montagem da base do braço robótico
Recomendo começar pela montagem da base do braço robótico Robot Arm MK2 Plus. Também se pode montar primeiro os motores de passo (steppers), pois facilita a montagem do stepper 2.
Lista de peças necessárias nesta fase:
- 1 x Base_Arm
- 1 x Base_Bearing_Holder
- 1 x Robot_Base_Low
- 1 x Robot_Base_Low_Gear
- 2 x parafuso M3 x 60 mm
- 2 x porca M3
- 1 x parafuso M6 x 25 mm
- 1 x porca M6 auto bloqueante
- 10 x esferas de 5 mm
Procedimento de montagem conforme os seguintes passos.
Deve-se proceder à preparação prévia do orifício na base_low de modo a que o parafuso M6 entre sem grande atrito.
Na mesma ordem de ideias deve-se também proceder à preparação prévia dos orifícios da base (Base_Arm) de modo a que os respectivos parafuso M4, ou os varões roscados, entrem sem grande atrito.
1º passo – Coloca-se a porca M6 auto-bloqueante no orifício apropriado na parte de baixo do Base_Arm.
2º passo – Fixa-se o Base_Arm ao Robot_Base_Low com os dois parafusos M3 de 60 mm e as duas porcas M3.
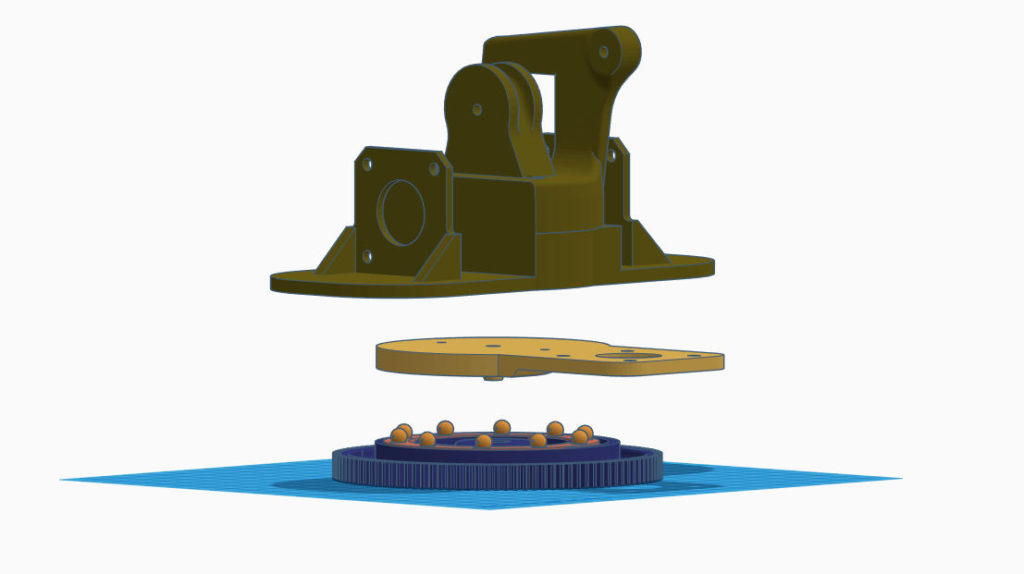
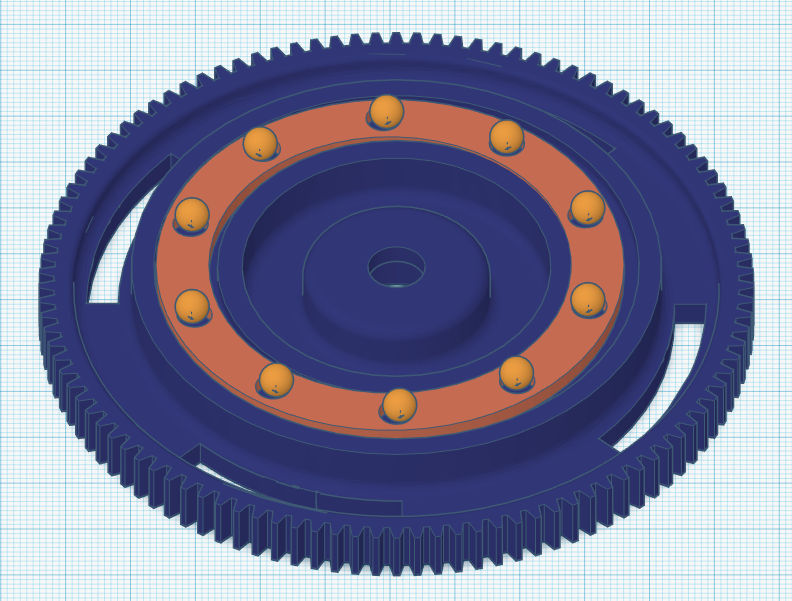
3º passo – Prepara-se o Robot_Base_Low_Gear, com a colocação do Base_Bearing_Holder, e das 10 esferas de 5 mm nos locais apropriados.
4º passo – Aplica-se o conjunto construído no passo 2 (Base_Arm + Robot_Base_Low), por cima do conjunto descrito no passo 3 (Robot_Base_Low_Gear + Base_Bearing_Holder + esferas), de modo a que a saliência onde encaixa o para fuso encaixe também no orifício no centro do Robot_Base_Low_Gear. Mantento todo o conjunto estavel, sem deixar cair ou deslocar-se do sitio nenhuma das peças, fixar com o parafuso M6 de 25 mm com a anilha M6. Este parafuso enrosca na porca M6 referida no passo 1.
Montagem dos motores de passo (steppers)
De modo a facilitar a montagem, recomendo montar os motores de passo (steppers) antes da montagem das hastes do manipulador.
Como o suporte para os motores de passo estão fixos ao Base_Arm, tem de se usar parafusos com a cabeça sextavada externa, e a montagem dos motores de passo antes das hastes facilita a sua colocação e aperto.
Por outro lado, como o eixo dos motores de passo que usei tem 25 mm, os motores 2 e 3 tem os seguintes pormenores:
Motor 2 (traseiro), o eixo prolonga-se para além da distancia (6 mm) permitida pela engrenagem maior da base (Robot_Base_Low_Gear), pelo que é necessário um suporte adicional por baixo dessa base.
Motor 3 (direito), o eixo é maior que o espaço disponível o que impede o encaixe adequado ao suporte vertical sem que sejam aplicados uns espaçadores (stepper-screw-spacer) com cerca de 5.5 mm em cada um dos 4 orifícios.
Lista de peças usadas nesta fase da montagem:
- 1 x Base_Arm (conjunto montado na fase anterior)
- 3 x Mortor de passos (Steppers) Nema 17 – 42HS40
- 4 x parafuso M3 x 8 mm
- 8 x parafuso M3 x 10 mm (cabeça sextavada externa)
- 3 x Stepper_Gear
- 4 x stepper-screw-spacer (opcional)
Antes de serem montados deve aplicar a cada um dos motores de passo deve ser aplicado a respectiva engrenagem (Stepper_Gear).
A ordem de montagem dos motores de passo, não é importante. O que importa ter em consideração é o seguinte:
No motor 1 e motor 3 usa-se em cada um 4 parafusos M3 de 10 mm com cabeça sextavada externa;
No motor 2 usa-se 4 parafusos M3 de 8 mm e eventualmente 2 anilhas M3 de 1 mm. Na montagem tenha em atenção a posição das engrenagens. Deve posicionar cada uma delas de modo a facilitar a colocação;
No motor 3 caso o eixo seja demasiado longo pode ser necessário aplicar os 4 espaçadores (stepper-screw-spacer).
Caso os parafusos M3 de 10 mm sejam demasiado compridos poderá ser necessário colocar umas porcas M3 a servir de anilha em cada parafuso, ou imprimir 4 anilhas semelhantes ao stepper-screw-spacer mas com 2 mm de espessura.
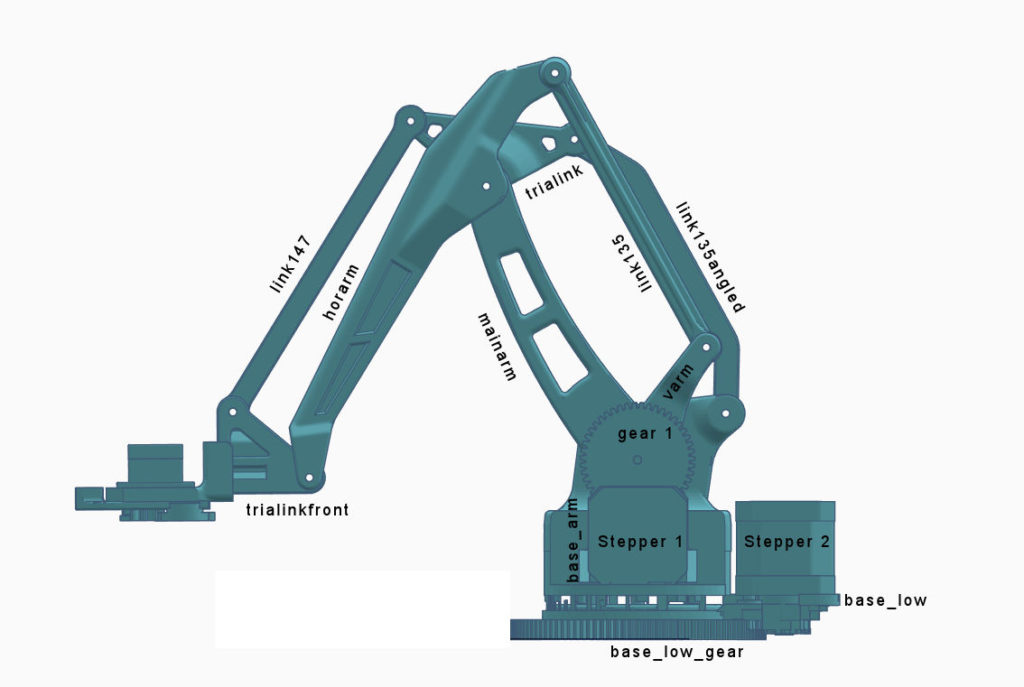
Montagem das hastes do manipulador
Depois de montada a base e os motores de passo, será a vez de montar as hastes do braço manipulador robótico Robot Arm MK2 Plus.
Lista de peças usadas nesta fase da montagem:
- 1 x base_arm (ou o conjunto montado nas fases anteriores)
- 1 x mainarm
- 1 x varm
- 1 x link135
- 1 x link135angled
- 1 x horarm
- 1 x trialink
- 1 x link147
- 1 x trialinkfront
- 1 x gear1
- 1 x gear2
- 1 x varão roscado M4 x 80 mm
- 1 x varão roscado M4 x 60 mm
- 5 x parafuso M4 x 20 mm
- 1 x parafuso M4 x 35 mm
- 1 x parafuso M4 x 50 mm
- 11 x porca M4 auto-bloqueante
Procedimento de montagem conforme os seguintes passos.
Antes de iniciar a montagem seguindo os vários passos descritos nesta fase, deve-se proceder à preparação prévia dos orifícios de todas das hastes de modo a que os respectivos parafuso M4, ou os varões roscados, entrem sem grande atrito.
Na montagem tenha em atenção a posição das engrenagens associadas aos motores de passos (stepper 1 e stepper2). Deve posicionar cada uma delas de modo a facilitar a colocação
1º passo – Prepara-se o conjunto onde actua o motor de passos esquerdo (stepper 1), e que define a altura do end effector. Para o efeito encaixa-se a saliência na engrenagem (gear1) no espaço apropriado da haste (varm). Usar o varão roscado M4 de 80 mm para fixar o conjunto (gear1 + varm) de modo a que o varão roscado fique apenas ligeiramente saliente face ao orifício da saida na haste pequena (varm). A maior extensão do varão deve estar saliente para o lado da engrenagem.
2º passo – Aplicar a haste vertical (mainarm) no espaço apropriado da base (base arm) e aplicar o conjunto montado no passo anterior (gear1 + varm + varão roscado), de modo o varão roscado encaixe na abertura da haste principal (mainarm). De seguida pressionar o varão roscado para que avance até ao outro lado da haste principal (de modo a que fique apenas um pouco saliente), passando pelo o orifício da base do braço (base_arm), fixando todo o conjunto de aplicado engrenagens e hastes. Neste passo tenha em conta posição dos dentes de ambas as engrenagens de forma a facilitar o encaixe.
3º passo – Encaixar o a saliência da engrenagem (gear2) no espaço apropriado na haste principal (mainarm), e o respectivo orifício ao varão roscado (que deve estar apenas um pouco saliente para facilitar a fixação). De seguida e pressionar o varão roscado de modo a que ele fique um pouco saliente face ao exterior das duas engrenagens. Com o varão roscado na posição adequada enroscar duas porcas M4 auto-bloqueantes em ambas a extremidades do varão roscado. Neste passo tenha em conta posição dos dentes de ambas as engrenagens de forma a facilitar o encaixe.
4º passo – Encaixar a haste horizontal (horarm) no encaixe superior da haste principal (mainarm) e inserir o varão roscado (M4 x 60mm) nos respectivos orifícios de forma a que o varão não saia pelo outro lado. De seguida aplicar o triângulo (trialink), ao espaço em vazio no topo da haste principal e pressionar o varão roscado de modo a que ele fique um pouco saliente face ao exterior da haste horizontal e à do triângulo. Com o varão roscado na posição adequada enroscar duas porcas M4 auto-bloqueantes em ambas a extremidades do varão roscado.
5º passo – Aplicar, pelos orifícios na extremidades, a haste secundária de controlo da posição vertical do end-efector (link135) ao orifício da haste (varm) na sua face interna, e ao orifício traseiro da haste horizontal (horarm), na sua face externa; com 2 parafusos M4 de 20 mm e porcas M4 auto bloqueantes (em cada orifício, um de cada).
6º passo – Aplicar, pelos orifícios na extremidades, a haste vertical de controlo da horizontalidade do end-efector (link135angled) ao orifício da haste fixa traseira da base (base_arm) na sua face interna e ao orifício traseiro do triângulo (trialink) na sua face interna, com 2 parafusos M4 de 20 mm e porcas M4 auto bloqueantes (em cada orifício, um de cada).
7º passo – Aplicar a haste horizontal de controlo da horizontalidade do end-efector (link147) ao orifício frontal do triângulo (trialink) na sua face interna, com 1 parafuso M4 de 20 mm e 1 porca M4 auto bloqueantes.
8º passo – Aplicar o triângulo frontal (trialinkfront), usado para fixar o end effector, no encaixe existente na extremidade frontal da haste horizontal (horarm) com 1 parafuso M4 de 35 mm e 1 porca M4 auto bloqueantes. De seguida, aplicar a haste horizontal de controlo da horizontalidade do end-efector (link147) ao orifício superior do triângulo frontal com 1 parafuso M4 de 50 mm e 1 porca M4 auto bloqueantes.
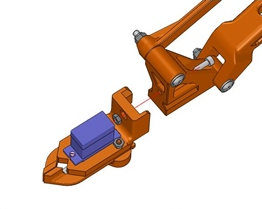
Montagem e aplicação da garra (end effector)
Depois de montada a base, os motores de passo, e as hastes será a vez de montar ao end effector (garra) do braço manipulador robótico Robot Arm MK2 Plus.
Lista de peças usadas nesta fase da montagem:
- 1 x claw_base
- 1 x claw_finger_dx
- 1 x claw_gear_drive
- 1 x claw_finger_sx
- 1 x claw_gear_driven
- 1 x servo Tower Pro SG90
- 1 x parafuso M3 com 8 mm
- 1 x parafuso M3 com 15 mm
- 1 x parafuso M3 com 20 mm
- 1 x porca M3
- 2 x porca M3 auto-bloqueante
- 2 x parafuso para montar servo
- 1 x parafuso para montar suporte no eixo do servo
Nota: esta descrição de montagem foi adaptada da previamente efectuada para o eezyBotArm MK2.
Todos os orifícios por onde passam os parafusos devem ser preparados préviamente com uma lima de modo a que o varão roscado e os parafusos deslizem e rodem sem muito atrito nos diversos orifícios.
A engrenagem (claw_gear_driven) tem duas saliências que servem como encaixe nos dois orifícios apropriados no dedo da garra (claw_finger_sx).
Antes de prosseguir deve certificar de que essas duas peças encaixam devidamente. Se não encaixarem deve-se desbastar os excesso nas saliências até estarem encaixarem.
O eixo do servo deve ser colocado nos zero graus. Mais tarde o fixador que é aplicado no eixo deve ficar posicionado para a frente. Deste modo quando o eixo do servo está no ângulo zero graus a garra está completamente fechada, e quando está no ângulo 180 graus a garra está completamente aberta.
Após os procedimentos preparatórios, a primeira coisa a fazer é montar o servo no local apropriado. Para o montar devem ser usados os dois parafusos para esse efeito que vêm com o servo.
A segunda coisa a fazer é fixar a engrenagem (claw_gear_drive) junto com o fixador (que vem com o servo) no eixo do servo, e usar o parafuso que vem como o servo para prender o conjunto.
Em terceiro lugar, deve encaixar a engrenagem (claw_gear_driven) no dedo da garra (claw_finger_sx) e montar o conjunto alinhado com o orifício à direita na base da garra (claw_base), usando um parafuso M3 de 20 mm e uma porca M3 auto bloqueante.
Em quarto lugar, proceder à montagem do outro dedo da garra, no orifício à esquerda na base da garra (claw_base), usando um parafuso M3 de 15 mm, e uma porca M3 auto bloqueante.
Com a garra montada o ultimo passo é encaixar a garra no suporte da garra que está a haste horizontal, e fixar o conjunto com um parafuso M3 de 8 mm e uma porca M3.
O end efector pode ser substituido por outros modelos, que sejam compativeis com o eezyBotArm MK2