https://micro-ros.github.io/
Categoria: Geral
ROS no ESP8266
Exemplo de desenvolvimento de um pequeno robot 2WD em ROS recorrendo ao ES8266.
https://github.com/dabmake/ESPROS
Estudo exploratório da interação homem máquina em linguagem natural no contexto visual
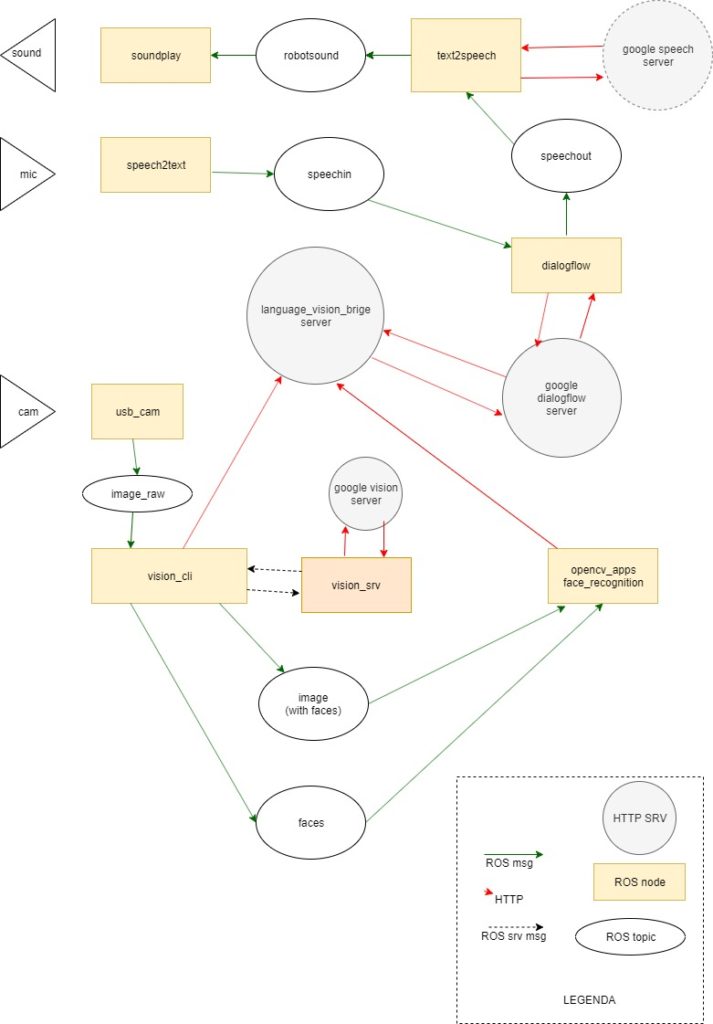
Pequeno relatório do estudo exploratório da interacção homem máquina em linguagem natural no contexto visual que efectuei com base num conjunto de processos ilustrados com as respectivas relações no diagrama mais abaixo.
Este abordagem à interacção homem máquina em linguagem natural tendo em conta o contexto visual da máquina, foi efectuada com o propósito de integrar o conhecimento adquirido num projecto de controlo vocal de um braço robótico Niryo One.
A solução que montei para explorar esta área está próxima do end user. Foi efectuada com o base no ROS e nos serviços do google cloud, e deste modo os principais serviços são caixas negras. Esta abordagem serve as minhas necessidades de aplicação prática já que não procuro saber como funcionam os processos mais complexos.
No entanto, alguns dos serviços remotos podem ser substituídos por soluções locais, dos quais destaco o reconhecimento de objectos e faces construídas com base no opencv e tensorflow. Uma segmentação dos custos de utilização dos serviços do google que exibo mais abaixo, sugere que serão os processos com o maior beneficio económico na execução local.
ROS nodes
Os nodes ROS usados no projecto estão contidos no opencv_apps e no meta-pacote gc_bridge, que foi adoptado de um dos vários projectos que usei para compor esta exploração.
O pacote opencv_apps contêm os nodes locais que usei para explorar esta área. A exploração dos serviços de detecção facial do google tem de ser complementada por um node que republique a informação do rectângulo no node de reconhecimento facial no opencv. (TODO. colocar no repositório)
O gc_bridge contêm vários pacotes que contribuem em conjunto com outros que surgem como dependências do projecto.
- gc_msgs
- gc_dialogflow_bridge
- gc_speech_bridge
- gc_vision_bridge
Diagrama de relações entre os vários sistemas e mensagens envolvidas
gc_bridge
Meta pacote copiado do gc_bridge (https://github.com/jihoonl/gc_bridge), e ao qual foi adicionado posteriormente os outros pacotes. De origem o gc_bridge contribuiu com o gc_msgs e o gc_vision_bridge.
gc_msgs
Este pacote contém a definição das mensagens trocadas com o serviço que processa a interacção com os serviços de análise de imagem do google.
As mensagens definidas neste pacote são usadas pelos nodes e serviços do gc_vision_bridge.
gc_dialogflow_brigde
Foi adaptado do pacote dialogflow_ros (https://github.com/piraka9011/dialogflow_ros). Contém o interface com o Google dialogflow services alimentado em tempo real pelo microfone, via transcrição de voz para texto, e o seu resultado alimenta o sistema de transcrição de texto para voz. O resultado dos serviços do dialogflow é construído tendo em conta a informação existente num servidor de contexto remoto, alimentado pelo os nodes do gc_vision_bridge.
gc_vision_bridge
Este pacote contem o software que processa as imagens recolhidas pelo node usb_cam, e as redirige para os nodes especializados de análise, armazenando num servidor remoto as respostas de cada um deles.
gc_speech_bridge
Este pacote foi adaptado do pacote speech_database (http://wiki.ros.org/speech_database)
Este pacote passou a incluir o node speech2text_mic.py que foi obtido no pacote (dialogflow_ros)


Nesta fase exploratória o leque de entendimento que se expressa no conjunto de comandos implementados visa apenas aspectos descritivos e de focalização de atenção.
Comandos implementados
- Enunciar os objectos que detecta nas imagem da camera de video
- Confirmar que está a ver um objecto
- Indicar quantos objectos é que está a ver de um tipo especifico
- Solicitação para ignorar determinados objectos
- Solicitação para parar de ignorar objectos previamente ignorados
- Saudar o utilizador
ROS roscore service
Instruções para correr o ROS roscore como serviço
Para o efeito é necessário criar dois ficheiros novos:
- /etc/systemd/system/roscore.service
- /etc/roscore_env.sh
Seguidamente usar o comando systemctl para testar o serviço e a sua activação posterior.
Criar o ficheiro para a unit roscore.service
sudo nano /etc/systemd/system/roscore.service
Substituir “kinetic” por “melodic” ou outra distribuição do ROS, na linha que começa por “ExecStart=”
Substituir “ubuntu” pelo user adequado na linha User=ubuntu
[Unit] After=NetworkManager.service time-sync.target [Service] Type=forking User=ubuntu # Start roscore as a fork and then wait for the tcp port to be opened # ---------------------------------------------------------------- # Source all the environment variables, start roscore in a fork # Since the service type is forking, systemd doesn't mark it as # 'started' until the original process exits, so we have the # non-forked shell wait until it can connect to the tcp opened by # roscore, and then exit, preventing conflicts with dependant services ExecStart=/bin/sh -c ". /opt/ros/kinetic/setup.sh; . /etc/roscore_env.sh; roscore & while ! echo exit | nc localhost 11311 > /dev/null; do sleep 1; done" [Install] WantedBy=multi-user.target
Criar o ficheiro com as variáveis de ambiente para o roscore
sudo nano /etc/roscore_env.sh
Colocar o seguinte texto.
#!/bin/sh export ROS_HOSTNAME=$(hostname).local export ROS_MASTER_URI=http://$ROS_HOSTNAME:11311
Após criar estes ficheiros passamos a fase de teste.
Teste e conclusão da configuração do serviço roscore
Para testar iniciamos o serviço e seguidamente consultamos o seu estado com os seguintes comandos:
systemctl start roscore systemctl status roscore
Se existir algum erro verificar se o texto foi bem copiado e as substituições bem feitas. Repetir a verificação até funcionar bem.
Após o serviço iniciar correctamente activar a sua inicialização automática com o seguinte comando:
systemctl enable roscore
O processo ficou concluido e o serviço roscore irá iniciar automaticamente.
Gestão do serviço roscore
Para iniciar o serviço
systemctl start roscore
Para saber o estado do serviço
systemctl status roscore
Para parar o serviço
systemctl stop roscore
Para ligar a inicialização automática do serviço
systemctl enable roscore
Para desligar a inicialização automática do serviço
systemctl disable roscore
ros package opencv-apps
http://wiki.ros.org/opencv_apps
https://github.com/ros-perception/opencv_apps
Install ros opencv apps
O pacote do ros opencv apps e as suas dependencias são instalados com os seguintes comandos:
Nota: se a instalação for no kinetic, basta substituir o melodic por kinetic.
sudo apt install ros-melodic-opencv-apps sudo apt install xterm
Também convem ter instalado uma fonte de imagens video, como pr exemplo o node usb_cam. Este node pode ser instalado com o seguinte comando:
sudo apt install ros-melodic-usb-cam
Criar o ficheiro usbcam.launch para o node usb cam num pacote de teste com a seguinte configuração:
<launch>
<arg name="view" default="false" />
<arg name="tf" default="true" />
<node if="$(arg tf)" pkg="tf" type="static_transform_publisher" name="usb_cam_tf" args="10.0 0 0.10 0 0 0 /base_link /usb_cam 10" />
<node name="usb_cam" pkg="usb_cam" type="usb_cam_node" output="screen" >
<param name="video_device" value="/dev/video0" />
<param name="image_width" value="800" />
<param name="image_height" value="600" />
<param name="pixel_format" value="yuyv" />
<param name="camera_frame_id" value="usb_cam" />
<param name="io_method" value="mmap"/>
</node>
<node if="$(arg view)" name="image_view" pkg="image_view" type="image_view" respawn="false" output="screen">
<remap from="image" to="/usb_cam/image_raw"/>
<param name="autosize" value="true" />
</node>
</launch>
Esta configuração é genérica, inclui a publicação do transform para a camera e a opção de visualização do video.
Pode ser executada com opções com o seguinte comando:
roslaunch pacote usbvideo.launch view:=true tf:=false
Funciona, pelos meus testes em várias cameras, umas capazes de maior resolução que outras, e pode ser modificada para a camera que usamos.
Configure face recognition on opencv apps
De modo a mais facil controlo sobre as configurações de lançamento dos nodes envolvidos no reconhecimento facial copiar para os ficheiros os seguintes ficheiros launch para um pacote de teste:
- https://raw.githubusercontent.com/ros-perception/opencv_apps/indigo/launch/face_detection.launch
- https://raw.githubusercontent.com/ros-perception/opencv_apps/indigo/launch/face_recognition.launch
De seguida adequar as copia dos ficheiros.
No ficheiro face_recognition.launch:
O pacote usado (o nome do pacote para onde foi copiado) deve o opencv_apps, na seguinte linha:
<include file=”$(find opencv_apps)/launch/face_detection.launch”
O tópico da imagem (da camera usb) que o node subscreve, é definido pelo default deve ser trocado pelo topico que o node usb_cam publica (normalmente /usb_cam/image_raw) na linha:
<arg name=”image” default=”image” />
No ficheiro face_detection.launch:
Proceder do modo descrito para o tópico da imagem.
Executar o reconhecimento facial
A base de dados de faces reconhecidas fica guardada na seguinte pasta:
~/.ros/opencv_apps/face_data
Na primeira execução não existem faces na base de dados, pelo que é necessário efectuar a sua recolha de pessoas a serem reconhecidas, e uma reinicialização do programa (que deve acontecer após cada sessão de recolha).
Para iniciar o reconhecimento facial deve iniciar primeiro o node que publica a imagem da camera de video, o usb_cam.
roslaunch pacote usbcam.launch view:=false tf:=false
De seguida executar o launch file do reconhecimento facial (face_recognition.launch) com o seguinte comando:
roslaunch pacote face_recognition.launch
Este comando executa os seguintes nodes:
- face_detection
- face_recognition
- face_recognition_trainer
Nesta configuração base acontece o seguinte:
O face_detection abre uma janela com circulos nas faces (e respectivos olhos) detectadas;
O face_recognition abre uma janela com circulos nas faces detectadas e indicação do rosto reconhecido;
O face_recognition_trainer abre uma janela que permite adicionar rostos a base de dados de faces a reconhecer.
A abertura destas janelas é opcional, assim como o lançamento do node de treino (face_recognition_trainer),
já que numa aplicação prática o resultado do reconhecimento pode ser recolhido pela subscrição do tópico: /face_recognition/output com mensagens do tipo opencv_apps/FaceArrayStamped.
rostopic echo /face_recognition/output header: seq: 2486 stamp: secs: 1572481537 nsecs: 290916277 frame_id: "usb_cam" faces: - face: x: 372.0 y: 191.0 width: 209.0 height: 209.0 eyes: - x: 413.0 y: 177.0 width: 49.0 height: 49.0 label: "sergio" confidence: 2279.43355205
roslaunch rospibot6 usbcam.launch view:=false tf:=false
roslaunch rospibot6 face_detection.launch
roslaunch rospibot6 face_recognition.launch
Descobri este pacote depois de ter tentado compilar o pacote face_recoginiton, com documentação no seguinte link:
http://wiki.ros.org/face_recognition
No entanto não compila nas versões mais recentes do ros.
Após efectuar o treino, o face_recgnition funciona em duas fases
na primeira detecta a face a reconhecer, e marca a região, na segunda identifica a face exibida nessa região na base de dados que alimentou o treino.
Como a base do pacote é opencv, voltei a minha atenção para ai, e mais especificamente para a documentação da versão que vem com ubuntu/bionic, e descobri este tutorial:
https://docs.opencv.org/3.2.0/da/d60/tutorial_face_main.html
O tutorial parece ser a resposta que me pode permitir fazer um node do ros para reconhecimento facial.
Consegui compilar os 3 exemplos, e do que compreendi, apenas o ultimo faz uma identificação ou não da face.
O exemplo procede à identificação da ultima face de uma base de dados experimental.
Por isso conclui que este seria um bom modelo para poder rescrever o pacote.
A fase da detecção facial está tambem descrita num tutorial do opencv disponivel no seguine endereço:
https://docs.opencv.org/…/d3a/facedetect_8cpp-example.html
Também considerei este exemplo um bom modelo para a parte que faltava.
No entanto o trabalho que tinha pela frente nao ia ser facil e por isso decidi que o melhor era procurar mais um bocado antes de tentar rescrever tudo de novo (para alem dos blocos retirados dos exemplos), que seria o que me esperava. Foi quando descobri o pacote opencv_apps.
Uma ultima nota sobre a performance da detecção facial com o opencv.
A face detection demora menos de 100ms, num portatil com um i7. No pi2 demora quase 1s (750ms).
ros package people
http://wiki.ros.org/people
Pelo que eu percebi necessita de uma camera stero.
Para compilar o pacote é necessário instalar as seguintes dependencias:
sudo apt install ros-melodic-easy-markers
sudo apt install ros-melodic-bfl
sudo apt install ros-melodic-kalman-filter