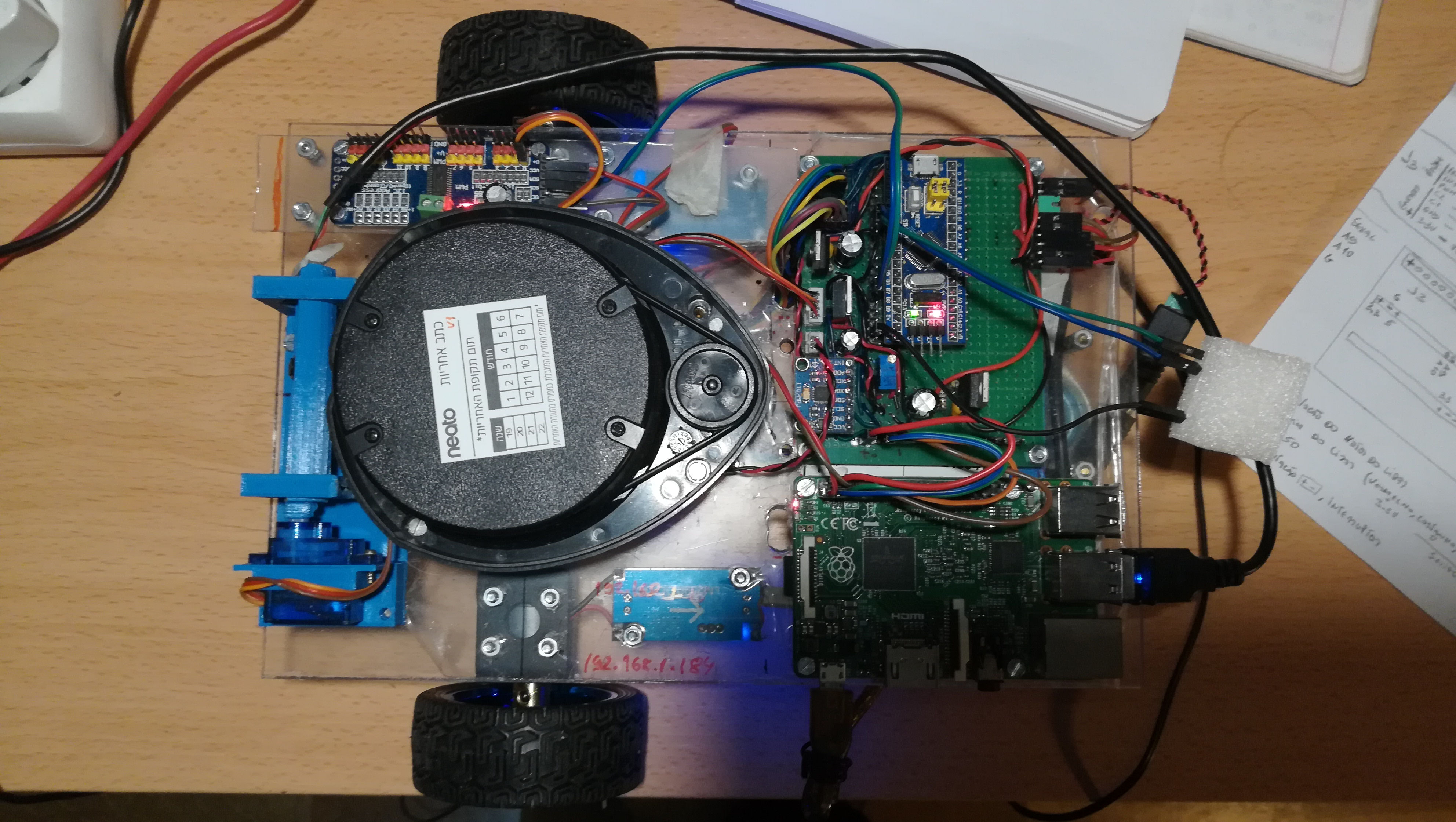
O primeiro robot que fiz capaz de fazer navegação autónoma com sucesso.
Inicialmente não tinha a câmara de vídeo na sua parte frontal. O aspeto do robot nessa altura era o da seguinte foto.

Posteriormente foi atualizado com uma camara montada num suporte com um servo.